


VMR-MC600(G)
CONTRÔLEUR DE SYSTÈME
Le VMR-MC600(G) est un contrôleur universel pour robots mobiles, développé indépendamment par Lanxin Robotics. Ce contrôleur intègre en une seule unité un processeur central, le contrôle des entrées-sorties, la communication par bus et la gestion de l'alimentation. Conçu selon les normes industrielles, il présente une taille compacte, une capacité de calcul puissante, une intégration élevée et un large éventail de fonctions. En 2023, plus de 12 000 unités ont été déployées.

SPECS TECH
Principes de base
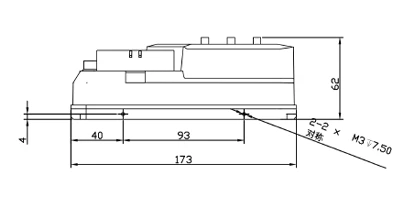
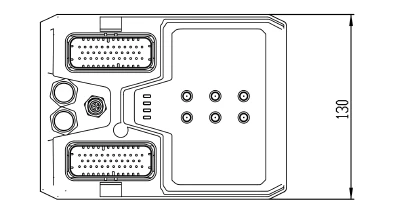
| Dimensions (L*L*H) | 173 mm * 130 mm * 62 mm |
| Poids net | 800 g |
| Tension de fonctionnement | 48 VDC |
| Autoconsommation | 7 W |
| Température de fonctionnement | -10~50 °C |
| Température de stockage | -20~60°C |
| Humidité de fonctionnement | 10~90% RH, sans condensation |
| Niveau de protection | IP54 |
Interfaces numériques
| Interfaces DI (12 canaux) | 1 canal pour la surveillance de l'état de charge de la main, 2 canaux pour les positions de limite supérieure/inférieure de la fourche, 2 canaux pour le positionnement gauche/droite de la fourche, 1 canal pour l'autorisation de fonctionnement du châssis, 6 canaux réservés |
| Interfaces DO (4 canaux) | 1 canal pour le transfert de charge, 1 canal pour l'alimentation du dispositif auxiliaire, 1 canal pour l'alimentation du moteur du châssis, 1 canal pour l'autorisation de fonctionnement du dispositif auxiliaire. |
Interface d'alimentation
| Interface 24VDC | 1 canal, puissance maximale 200W |
Interfaces de bus
| Interfaces CAN | 3 canaux (2 pour le MCU, 1 pour la carte mère) |
| Interfaces RS485 | 5 canaux (4 pour le MCU, 1 pour la carte mère) |
| Interfaces RS232 | 2 canaux (1 pour le MCU, 1 pour la carte mère) |
Interfaces réseau
| Ethernet | 2 canaux, 10/100/1000Mbps, interface M12 |
| Réseau sans fil | IEEE 802.11ax/ac/a/b/g/n(2T2R), 2.400GHz~2.4835GHz, 5.150GHz~5.850GHz |
| Réseau mobile | Prise en charge complète de la 5G en option |
Autres interfaces
| USB 2.0 | 1 canal |
| Sortie audio | 2 canaux, 15W chacun |
Voyants lumineux
| État du LAN1 | Vert clignotant |
| État du LAN2 | Vert clignotant |
| Indicateur d'état | Vert clignotant |
| Indicateur de puissance | Vert stable |
Fonctions spéciales
| Entrée d'arrêt d'urgence | 1 canal, normalement fermé |
| Sortie d'arrêt d'urgence | 1 canal, normalement fermé |
| Bordure de sécurité | 1 canal, connexion en série, résistance finale 8,2kΩ |
| Entrée de sécurité | 1 canal, normalement fermé |
| Boutons de fonction | Alimentation, réinitialisation, pause, commutateur manuel/automatique |
| Bouton de démarrage | 1 canal, normalement ouvert |
Interaction périphérique
| Ascenseur | Le système prend en charge l'appel et la commutation d'étage pour les ascenseurs et les monte-charges, ainsi que la commutation automatique des cartes. |
| Porte automatique/Porte de douche aérienne | Le véhicule demandera d'ouvrir la porte lors du passage et de la refermer ensuite |
| Boîte d'appel | Les tâches déclenchées par les boîtes vocales peuvent être configurées librement |
| Équipement automatisé | Intégration avec des équipements prenant en charge des protocoles d'automatisation communs pour les appels de tâches et les actions de chargement/déchargement |
Gestion des cartes
| Plan du bâtiment | Créer des cartes pour le fonctionnement des robots dans le backend |
| Édition de cartes | Modifier les cartes pour ajouter des itinéraires et des points d'opération afin de compléter les processus commerciaux. |
| Piqûre de carte | Combiner plusieurs cartes en une seule pour les zones plus étendues |
| Opérations par lots | Edition en masse de points et de lignes sur la carte |
| Synchronisation automatique | Synchronisation automatique des cartes avec d'autres robots après modification |
Gestion anormale
| Alertes anormales | Alertes pop-up ou bulles en cas d'anomalies |
| Gestion des journaux | Filtrer automatiquement les journaux pertinents pour l'analyse en fonction du type d'anomalie |
| Alarmes vocales | Configurer différentes alertes vocales pour différentes anomalies |
Interaction homme-machine
| Contrôle en temps réel | Contrôler la vitesse du robot, le niveau de la batterie, l'emplacement, l'état et les données des capteurs en temps réel. |
| Écran tactile | Visualisation et commande du robot via l'écran tactile |
| Affichage de l'arrière-plan du PC | Visualisation et utilisation du robot via un PC |
| Modbus API | API Modbus standard pour le développement secondaire |
| VDA5050 | Prise en charge du protocole VDA5050 pour une intégration transparente avec les systèmes conformes |
| Communication 5G | Le soutien à la 5G réduira considérablement l'instabilité du réseau |
| Communication WiFi | Prise en charge du WiFi avec commutateur d'itinérance pour une connectivité stable pendant les déplacements |
| OTA | Prise en charge des mises à jour OTA au sein du réseau local pour les mises à jour de programmes via le système de répartition |
Gestion des tâches
| Transfert des tâches | Le système réattribue les tâches si un robot ne peut pas accomplir sa tâche actuelle ou si un autre robot est plus approprié. |
| Éviter la congestion | Replanifier les itinéraires pour éviter les chemins bloqués et trouver l'itinéraire disponible le plus rapide |
| Contrôle du commandement | Contrôler les actions spécifiques et les entrées-sorties du robot |
| Étalonnage de l'appareil | Étalonnage en un clic pour les principaux appareils (laser, caméra, laser 3D) |
| Déménagement | Relocalisation du robot via l'écran ou le backend, sur la base des points de la station |
| Contrôle manuel | Commande manuelle du robot via les boutons de l'interface pour les mouvements |
| Répartition multi-robots | Coordonner et gérer plusieurs robots, en prenant en charge jusqu'à 1 000 robots. |
| Collaboration multi-robots | Permettre à plusieurs robots d'effectuer la même tâche en collaboration |
