


VMR-MC600(G)
CONTROLADOR DEL SISTEMA
El VMR-MC600(G) es un controlador de núcleo universal para robots móviles, desarrollado de forma independiente por Lanxin Robotics. Este controlador integra un procesador central, control de E/S, comunicación de bus y gestión de energía en una sola unidad. Diseñado conforme a los estándares industriales, presenta un tamaño compacto, una potente capacidad de cálculo, una alta integración y una amplia gama de funciones. Hasta 2023, se habían desplegado más de 12.000 unidades.

ESPECIFICACIONES TÉCNICAS
Conceptos básicos
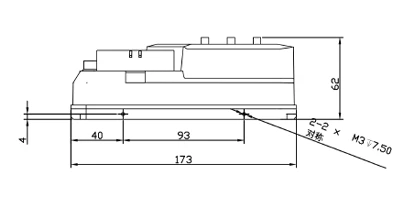
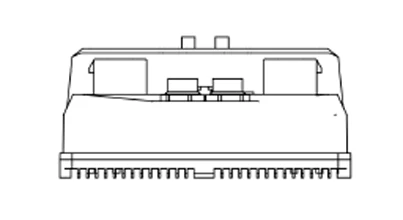
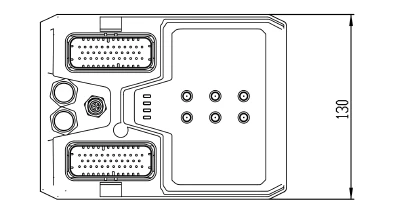
| Dimensiones (largo*ancho*alto) | 173 mm * 130 mm * 62 mm |
| Peso neto | 800 g |
| Tensión de funcionamiento | 48 VDC |
| Autoconsumo | 7 W |
| Temperatura de funcionamiento | -10~50 °C |
| Temperatura de almacenamiento | -20~60°C |
| Humedad de funcionamiento | 10~90% HR, sin condensación |
| Nivel de protección | IP54 |
Interfaces digitales
| Interfaces DI (12 canales) | 1 canal para supervisión del estado de carga manual, 2 canales para posiciones límite superior/inferior de la horquilla, 2 canales para posicionamiento izquierdo/derecho de la horquilla, 1 canal para permiso de funcionamiento del chasis, 6 canales reservados |
| Interfaces DO (4 canales) | 1 canal para el handshake de carga, 1 canal para la alimentación del dispositivo auxiliar, 1 canal para la alimentación del motor del chasis, 1 canal para el permiso de funcionamiento del dispositivo auxiliar. |
Interfaz de alimentación
| Interfaz 24VDC | 1 canal, potencia máxima 200 W |
Interfaces de bus
| Interfaces CAN | 3 canales (2 para MCU, 1 para placa base) |
| Interfaces RS485 | 5 canales (4 para MCU, 1 para placa base) |
| Interfaces RS232 | 2 canales (1 para MCU, 1 para placa base) |
Interfaces de red
| Ethernet | 2 canales, 10/100/1000Mbps, interfaz M12 |
| Red inalámbrica | IEEE 802.11ax/ac/a/b/g/n(2T2R), 2,400GHz~2,4835GHz, 5,150GHz~5,850GHz |
| Red móvil | Compatibilidad total 5G opcional |
Otras interfaces
| USB 2.0 | 1 canal |
| Salida de audio | 2 canales, 15 W cada uno |
Indicadores luminosos
| LAN1 Estado | Verde intermitente |
| LAN2 Estado | Verde intermitente |
| Indicador de estado | Verde intermitente |
| Indicador de encendido | Verde estable |
Funciones especiales
| Entrada de parada de emergencia | 1 canal, normalmente cerrado |
| Salida de parada de emergencia | 1 canal, normalmente cerrado |
| Banda de seguridad | 1 canal, conexión en serie, resistencia final 8,2kΩ |
| Entrada de seguridad | 1 canal, normalmente cerrado |
| Botones de función | Encendido, Reinicio, Pausa, Interruptor manual/automático |
| Botón de inicio | 1 canal, normalmente abierto |
Interacción periférica
| Ascensor | El sistema admite llamada y cambio de planta para ascensores/elevadores, cambio automático de mapas |
| Puerta automática/Puerta de ducha de aire | El vehículo solicitará abrir la puerta al pasar y cerrarla después |
| Buzón de llamadas | Las tareas activadas por los buzones de llamadas pueden configurarse libremente |
| Equipos automatizados | Integración con equipos compatibles con protocolos de automatización comunes para llamadas a tareas y acciones de carga/descarga. |
Gestión de mapas
| Mapa del edificio | Crear mapas para el funcionamiento del robot en el backend |
| Edición de mapas | Editar mapas para añadir rutas y puntos de operación para completar los procesos empresariales. |
| Costura de mapas | Combine varios mapas en uno para áreas más extensas |
| Operaciones por lotes | Edición masiva de puntos y líneas en el mapa |
| Sincronización automática | Sincroniza automáticamente los mapas con otros robots después de editarlos |
Gestión anormal
| Alertas anormales | Alertas emergentes o de burbujas para detectar anomalías |
| Gestión de registros | Filtre automáticamente los registros relevantes para el análisis en función del tipo de anomalía |
| Alarmas de voz | Configure diferentes alertas de voz para distintas anomalías |
Interacción hombre-máquina
| Control en tiempo real | Supervise en tiempo real la velocidad, el nivel de batería, la ubicación, el estado y los datos de los sensores del robot. |
| Pantalla táctil | Visualización y manejo del robot mediante pantalla táctil |
| Pantalla PC Backend | Visualización y manejo del robot a través del PC |
| API Modbus | API Modbus estándar para desarrollo secundario |
| VDA5050 | Compatibilidad con el protocolo VDA5050 para una integración perfecta con los sistemas compatibles. |
| Comunicación 5G | Compatibilidad con 5G para reducir significativamente la inestabilidad de la red |
| Comunicación WiFi | Compatible con WiFi con interruptor de itinerancia para una conectividad estable durante los desplazamientos |
| OTA | Soporte para actualizaciones OTA dentro de la red local para actualizaciones de programas a través del sistema de despacho |
Gestión de tareas
| Entrega de tareas | El sistema reasigna tareas si un robot no puede completar su tarea actual o si otro robot es más adecuado. |
| Evitar la congestión | Replanificar rutas para evitar caminos bloqueados y encontrar la ruta más rápida disponible |
| Control de mando | Controlar acciones específicas e IO del robot |
| Calibración de dispositivos | Calibración con un solo clic para dispositivos clave (láser, cámara, láser 3D) |
| Reubicación | Reubicar el robot a través de la pantalla o del backend, en función de los puntos de la estación |
| Control manual | Controla el robot manualmente mediante los botones de la interfaz para el movimiento |
| Despacho multirrobot | Coordinar y gestionar varios robots, con soporte para hasta 1.000 robots |
| Colaboración entre varios robots | Permitir que varios robots realicen la misma tarea en colaboración |
