


VMR-MC600(G)
ระบบควบคุม
VMR-MC600(G) เป็นตัวควบคุมแกนกลางแบบสากลสำหรับหุ่นยนต์เคลื่อนที่ ซึ่งได้รับการพัฒนาโดย Lanxin Robotics อย่างอิสระ ตัวควบคุมนี้ผสานรวมโปรเซสเซอร์แกนกลาง, การควบคุม IO, การสื่อสารบัส และการจัดการพลังงานไว้ในหน่วยเดียว ออกแบบตามมาตรฐานอุตสาหกรรม มีขนาดกะทัดรัด, สมรรถนะการคำนวณที่ทรงพลัง, การผสานรวมสูง, และฟังก์ชันที่หลากหลาย ณ ปี 2023 ได้มีการติดตั้งใช้งานไปแล้วมากกว่า 12,000 หน่วย.

ข้อมูลจำเพาะทางเทคนิค
พื้นฐาน
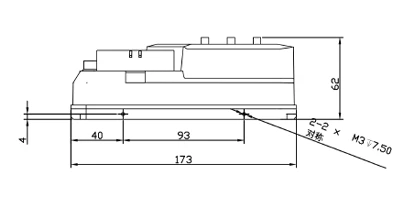
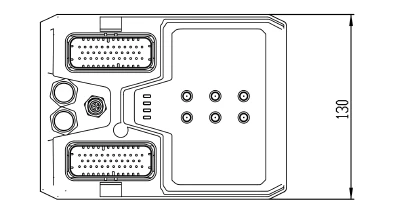
| ขนาด (ยาว*กว้าง*สูง) | 173 มม. * 130 มม. * 62 มม. |
| น้ำหนักสุทธิ | 800 กรัม |
| แรงดันไฟฟ้าในการทำงาน | 48 โวลต์ดีซี |
| การใช้เอง | 7 วัตต์ |
| อุณหภูมิการทำงาน | -10~50 °C |
| อุณหภูมิในการเก็บรักษา | -20~60°C |
| ความชื้นในการทำงาน | 10~90% RH, ไม่ควบแน่น |
| ระดับการป้องกัน | ไอพี54 |
อินเตอร์เฟซดิจิทัล
| อินเตอร์เฟซ DI (12 ช่อง) | 1 ช่องสำหรับตรวจสอบสถานะการชาร์จด้วยมือ, 2 ช่องสำหรับตำแหน่งขีดจำกัดบน/ล่างของส้อม, 2 ช่องสำหรับตำแหน่งซ้าย/ขวาของส้อม, 1 ช่องสำหรับสิทธิ์การใช้งานแชสซี, 6 ช่องสำรอง |
| DO อินเทอร์เฟซ (4 ช่อง) | 1 ช่องสำหรับชาร์จการจับมือ, 1 ช่องสำหรับจ่ายไฟอุปกรณ์เสริม, 1 ช่องสำหรับจ่ายไฟมอเตอร์ตัวถัง, 1 ช่องสำหรับอนุญาตการทำงานอุปกรณ์เสริม |
อินเตอร์เฟซแหล่งจ่ายไฟ
| อินเตอร์เฟซ 24VDC | 1 ช่อง, กำลังไฟสูงสุด 200W |
อินเตอร์เฟซของรถบัส
| อินเตอร์เฟซ CAN | 3 ช่อง (2 สำหรับ MCU, 1 สำหรับบอร์ดหลัก) |
| RS485 อินเทอร์เฟซ | 5 ช่อง (4 สำหรับ MCU, 1 สำหรับบอร์ดหลัก) |
| RS232 อินเตอร์เฟซ | 2 ช่อง (1 สำหรับ MCU, 1 สำหรับบอร์ดหลัก) |
อินเตอร์เฟซเครือข่าย
| อีเธอร์เน็ต | 2 ช่อง, 10/100/1000Mbps, อินเทอร์เฟซ M12 |
| เครือข่ายไร้สาย | IEEE 802.11ax/ac/a/b/g/n(2T2R), 2.400GHz~2.4835GHz, 5.150GHz~5.850GHz |
| เครือข่ายมือถือ | รองรับ 5G เต็มรูปแบบ (เลือกได้) |
อินเตอร์เฟซอื่น ๆ
| USB 2.0 | 1 ช่อง |
| เสียงออก | 2 ช่อง, 15 วัตต์ต่อช่อง |
ไฟแสดงสถานะ
| สถานะ LAN1 | ไฟกระพริบสีเขียว |
| สถานะ LAN2 | ไฟกระพริบสีเขียว |
| ตัวบ่งชี้สถานะ | ไฟกระพริบสีเขียว |
| ไฟแสดงสถานะ | สีเขียวคงที่ |
ฟังก์ชันพิเศษ
| อินพุตหยุดฉุกเฉิน | 1 ช่อง, ปิดตามปกติ |
| สัญญาณหยุดฉุกเฉิน | 1 ช่อง, ปิดตามปกติ |
| ขอบนิรภัย | 1 ช่อง, การเชื่อมต่อแบบอนุกรม, ความต้านทานปลายทาง 8.2kΩ |
| ข้อมูลความปลอดภัย | 1 ช่อง, ปิดตามปกติ |
| ปุ่มฟังก์ชัน | ปุ่มเปิด/ปิด, รีเซ็ต, หยุดชั่วคราว, สลับโหมดแมนนวล/อัตโนมัติ |
| ปุ่มเริ่มต้น | 1 ช่อง, ปกติเปิด |
ปฏิสัมพันธ์รอบข้าง
| ลิฟต์/ลิฟท์ | ระบบรองรับการโทรและการสลับชั้นสำหรับลิฟต์/ยกระดับ, การสลับแผนที่อัตโนมัติ |
| ประตูอัตโนมัติ/ประตูอาบน้ำอากาศ | ยานพาหนะจะขอเปิดประตูเมื่อผ่านและปิดประตูหลังจากนั้น |
| กล่องโทรศัพท์ | งานที่ถูกกระตุ้นโดยกล่องสัญญาณสามารถกำหนดค่าได้อย่างอิสระ |
| อุปกรณ์อัตโนมัติ | การผสานรวมกับอุปกรณ์ที่รองรับโปรโตคอลอัตโนมัติทั่วไปสำหรับการเรียกใช้งานและดำเนินการโหลด/ขนถ่าย |
การจัดการแผนที่
| การสร้างแผนที่ | สร้างแผนที่สำหรับการทำงานของหุ่นยนต์ในระบบหลังบ้าน |
| การแก้ไขแผนที่ | แก้ไขแผนที่เพื่อเพิ่มเส้นทางปฏิบัติการและจุดต่างๆ เพื่อดำเนินกระบวนการทางธุรกิจให้สมบูรณ์ |
| การต่อแผนที่ | รวมแผนที่หลายแผ่นเป็นหนึ่งเดียวสำหรับพื้นที่ขนาดใหญ่ |
| การดำเนินการแบบกลุ่ม | การแก้ไขจุดและเส้นบนแผนที่แบบกลุ่ม |
| การซิงค์อัตโนมัติ | ซิงค์แผนที่ไปยังหุ่นยนต์อื่นโดยอัตโนมัติหลังจากการแก้ไข |
การจัดการที่ผิดปกติ
| การแจ้งเตือนผิดปกติ | การแจ้งเตือนแบบป๊อปอัพหรือฟองอากาศสำหรับความผิดปกติ |
| การจัดการบันทึก | กรองบันทึกที่เกี่ยวข้องโดยอัตโนมัติเพื่อการวิเคราะห์ตามประเภทของความผิดปกติ |
| ระบบแจ้งเตือนด้วยเสียง | กำหนดค่าการแจ้งเตือนด้วยเสียงที่แตกต่างกันสำหรับความผิดปกติแต่ละประเภท |
การปฏิสัมพันธ์ระหว่างมนุษย์กับเครื่องจักร
| การตรวจสอบแบบเรียลไทม์ | ตรวจสอบความเร็วของหุ่นยนต์ ระดับแบตเตอรี่ ตำแหน่ง สถานะ และข้อมูลเซ็นเซอร์แบบเรียลไทม์ |
| หน้าจอสัมผัส | ดูและควบคุมหุ่นยนต์ผ่านหน้าจอสัมผัส |
| การแสดงผลแบ็กเอนด์ของพีซี | ดูและควบคุมหุ่นยนต์ผ่านคอมพิวเตอร์ |
| โมดบัส API | มาตรฐาน Modbus API สำหรับการพัฒนาเพิ่มเติม |
| VDA5050 | รองรับโปรโตคอล VDA5050 สำหรับการผสานการทำงานอย่างไร้รอยต่อกับระบบที่รองรับ |
| การสื่อสาร 5G | การสนับสนุน 5G เพื่อลดความไม่เสถียรของเครือข่ายอย่างมีนัยสำคัญ |
| การสื่อสารผ่าน WiFi | รองรับ WiFi พร้อมสวิตช์โรมมิ่งเพื่อการเชื่อมต่อที่เสถียรขณะเคลื่อนที่ |
| OTA | รองรับการอัปเดต OTA ภายในเครือข่ายท้องถิ่นสำหรับการอัปเกรดโปรแกรมผ่านระบบส่งคำสั่ง |
การจัดการงาน
| การส่งมอบงาน | ระบบจะจัดสรรงานใหม่หากหุ่นยนต์ไม่สามารถทำงานปัจจุบันให้เสร็จสิ้นได้ หรือหากหุ่นยนต์ตัวอื่นมีความเหมาะสมมากกว่า |
| การหลีกเลี่ยงความแออัด | วางแผนเส้นทางใหม่เพื่อหลีกเลี่ยงเส้นทางที่ถูกปิดกั้นและค้นหาเส้นทางที่เร็วที่สุดที่มีอยู่ |
| การควบคุมบัญชาการ | ควบคุมการกระทำเฉพาะและอินพุต/เอาต์พุตของหุ่นยนต์ |
| การปรับเทียบอุปกรณ์ | การปรับเทียบด้วยคลิกเดียวสำหรับอุปกรณ์หลัก (เลเซอร์, กล้อง, เลเซอร์ 3 มิติ) |
| การย้ายที่อยู่ | ย้ายหุ่นยนต์ผ่านหน้าจอหรือระบบหลังบ้าน โดยอิงตามจุดสถานี |
| การควบคุมด้วยตนเอง | ควบคุมหุ่นยนต์ด้วยตนเองผ่านปุ่มบนอินเทอร์เฟซสำหรับการเคลื่อนไหว |
| การส่งมอบงานให้กับหุ่นยนต์หลายตัว | ประสานงานและจัดการหุ่นยนต์หลายตัว รองรับได้สูงสุดถึง 1,000 ตัว |
| การร่วมมือของหุ่นยนต์หลายตัว | เปิดใช้งานหุ่นยนต์หลายตัวให้ทำงานร่วมกันเพื่อทำภารกิจเดียวกันให้สำเร็จ |
