เซ็นเซอร์วิชั่นสามมิติ
ซีรีส์ S
ซีรีส์ M
ซีรีส์ V
ซีรีส์ H
วิชั่น โมบาย โรบอท (VMR)
หุ่นยนต์เคลื่อนที่
เอเอ็มอาร์
เอฟเอ็มอาร์
TMR
ฮาร์ดแวร์และซอฟต์แวร์
ตัวควบคุมหลักสำหรับ AMRs
แพลตฟอร์มหุ่นยนต์มนุษย์
ออมนิเฮด
ซอฟต์แวร์
MCS
อาร์ซีเอส
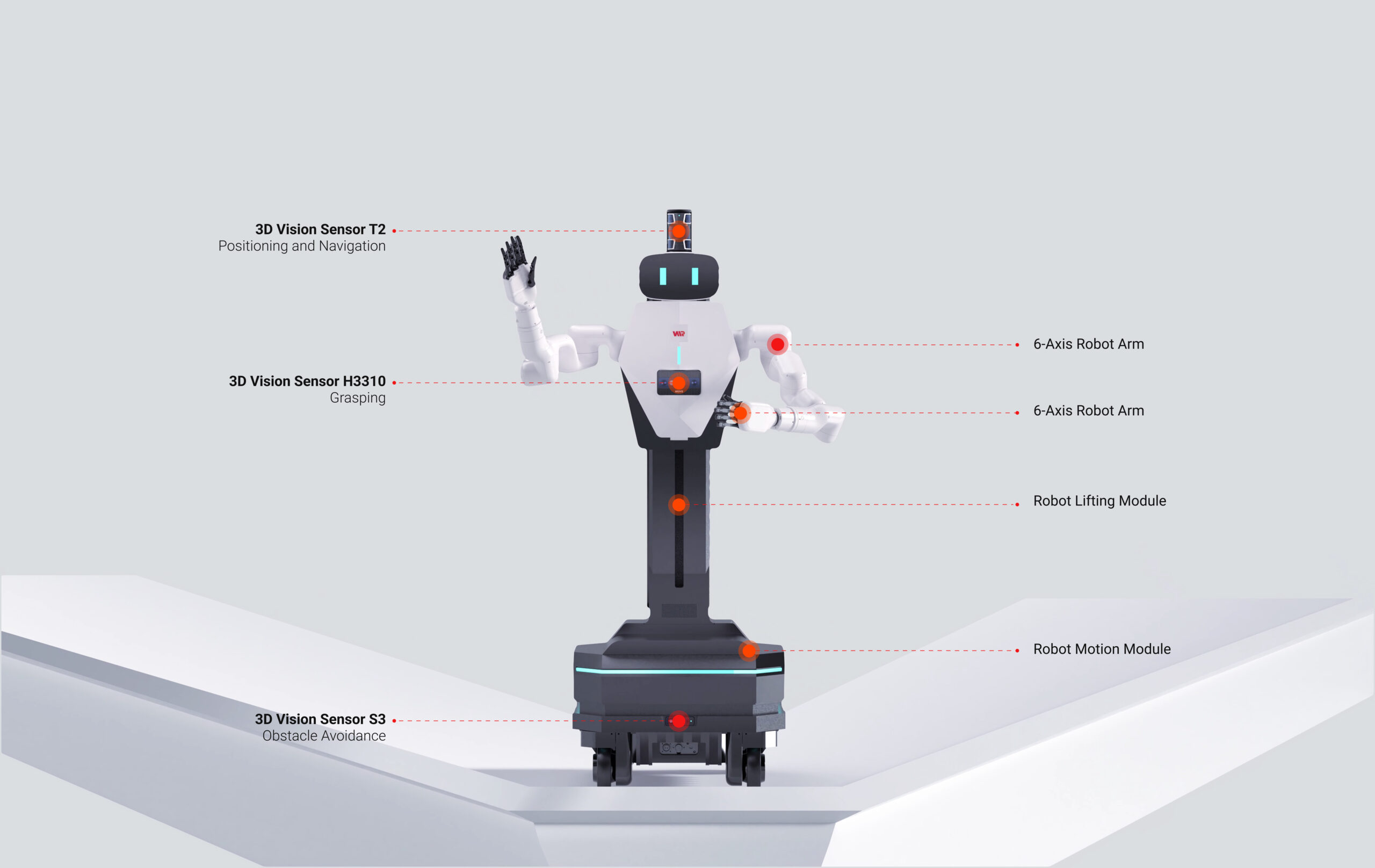
หุ่นยนต์มนุษย์
VB1
VB1-I
VB2
โซลูชัน
3C อิเล็กทรอนิกส์
ยานยนต์
พลังงานใหม่ (แบตเตอรี่/โฟโตโวลตาอิก)
บรรจุภัณฑ์และการพิมพ์
เกี่ยวกับ Lanxin
เรื่องราวของเรา
ข่าว
ติดต่อเรา
ดาวน์โหลด
เซ็นเซอร์วิชั่นสามมิติ
ซีรีส์ S
ซีรีส์ M
ซีรีส์ V
ซีรีส์ H
วิชั่น โมบาย โรบอท (VMR)
หุ่นยนต์เคลื่อนที่
เอเอ็มอาร์
เอฟเอ็มอาร์
TMR
ฮาร์ดแวร์และซอฟต์แวร์
ตัวควบคุมหลักสำหรับ AMRs
แพลตฟอร์มหุ่นยนต์มนุษย์
ออมนิเฮด
ซอฟต์แวร์
MCS
อาร์ซีเอส
หุ่นยนต์มนุษย์
VB1
VB1-I
VB2
โซลูชัน
3C อิเล็กทรอนิกส์
ยานยนต์
พลังงานใหม่ (แบตเตอรี่/โฟโตโวลตาอิก)
บรรจุภัณฑ์และการพิมพ์
เกี่ยวกับ Lanxin
เรื่องราวของเรา
ข่าว
ติดต่อเรา
ดาวน์โหลด
ยืดหยุ่น
แอนโธโมพอร์ฟิก
การออกแบบ
การออกแบบที่ผสานเข้ากับสรีรศาสตร์
ภาพรวม
ข้อมูลจำเพาะทางเทคนิค
คุณสมบัติ
ขอใบเสนอราคา
ภาพรวม
ข้อมูลจำเพาะทางเทคนิค
0.4~2 เมตร
ความสูงในการทำงาน
2~3 ชั่วโมง
อายุการใช้งานแบตเตอรี่
6
ข้อต่อแขน
2 กิโลกรัม
แรงจับยึด
580 มิลลิเมตร
เส้นผ่านศูนย์กลางการหมุน
3D เลเซอร์ SLAM
วิธีการนำทาง
ชื่อ
หุ่นยนต์มนุษย์
แบบจำลอง
VB1
ขนาด
700×610×1650
ระยะห่างจากพื้นถึงใต้ท้องรถ
22 มิลลิเมตร
อุณหภูมิการทำงาน
0~40℃
ความเร็ว
0~1.2 เมตรต่อวินาที
โหมดการขับขี่
ล้อสี่ทิศทาง
ความชื้น
10~90% RH, ไม่มีการควบแน่น
คุณสมบัติของสินค้า
การออกแบบเชิงมนุษย์ที่ยืดหยุ่น
ระบบวิสัยทัศน์เชิงลึก RGB-D แบบพาโนรามา
แพลตฟอร์มเคลื่อนที่แบบล้อหมุนได้รอบทิศทางที่มีความคล่องแคล่ว
การจัดการพลังงานอัจฉริยะที่คงทนยาวนาน
ศูนย์กลางการโต้ตอบด้วยปัญญาประดิษฐ์แบบหลายรูปแบบ
Thai
English
Japanese
Korean
German
French
Spanish