VMR-MC600(G)은 란신 로보틱스에서 독자적으로 개발한 모바일 로봇용 범용 코어 컨트롤러입니다. 이 컨트롤러는 코어 프로세서, IO 제어, 버스 통신 및 전원 관리를 단일 장치에 통합합니다. 산업 표준에 따라 설계된 이 컨트롤러는 컴팩트한 크기, 강력한 컴퓨팅 성능, 높은 통합성 및 다양한 기능을 갖추고 있습니다. 2023년 현재 12,000대 이상이 배포되었습니다.
기술 사양
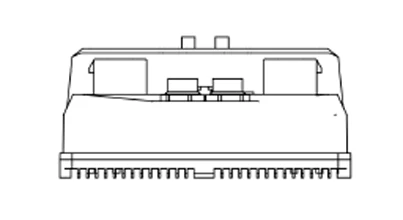
전면 보기
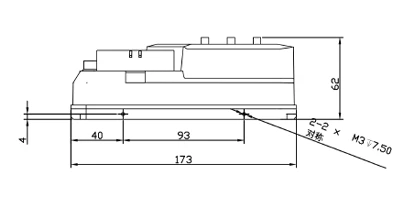
측면 보기
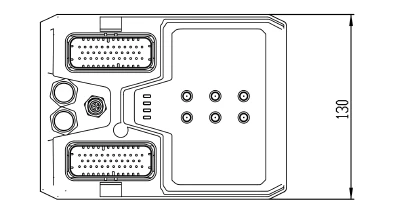
얼굴 보기
기본 사항
치수(L*W*H)
173mm * 130mm * 62mm
순 중량
800 g
작동 전압
48VDC
자체 소비
7 W
작동 온도
-10~50 °C
보관 온도
-20~60°C
작동 습도
10~90% RH, 비응축식
보호 수준
IP54
디지털 인터페이스
DI 인터페이스(12개 채널)
핸드 충전 상태 모니터링용 채널 1개, 포크 상한/하한 위치 설정용 채널 2개, 포크 좌/우 위치 설정용 채널 2개, 섀시 작동 권한용 채널 1개, 예약 채널 6개
DO 인터페이스(4채널)
핸드쉐이크 충전용 1채널, 보조 장치 전원 공급용 1채널, 섀시 모터 전원 공급용 1채널, 보조 장치 작동 권한용 1채널