Révolutionner la logistique grâce à la précision, la stabilité et la sécurité intelligente.
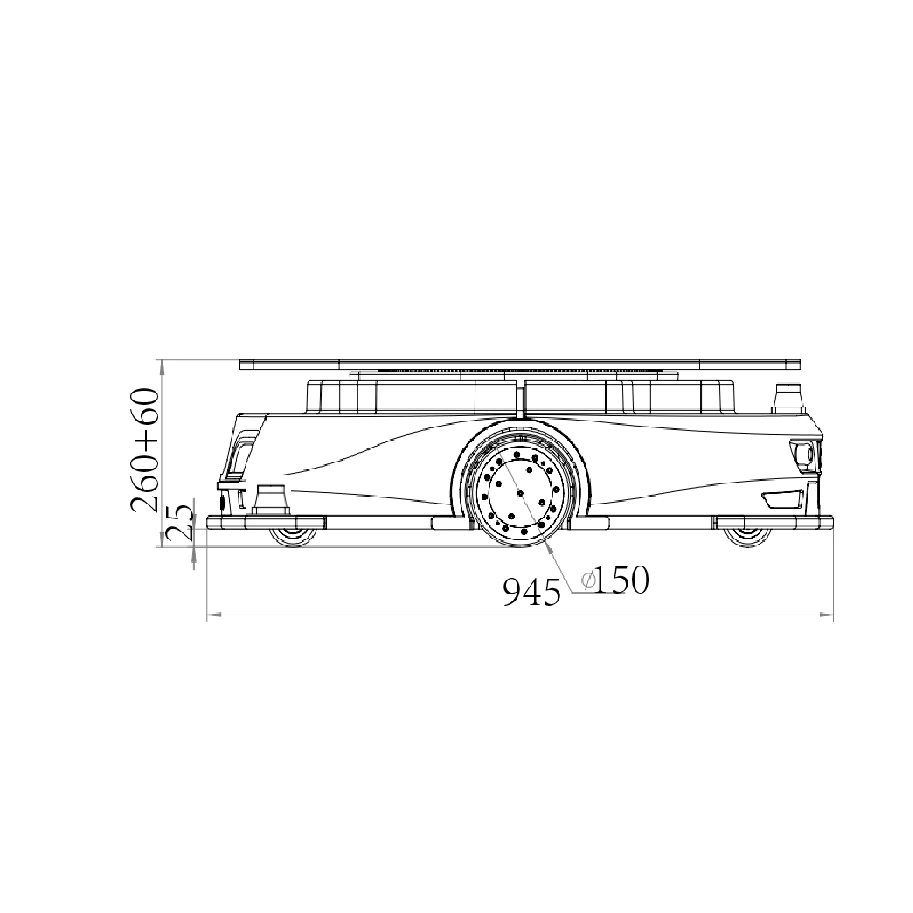
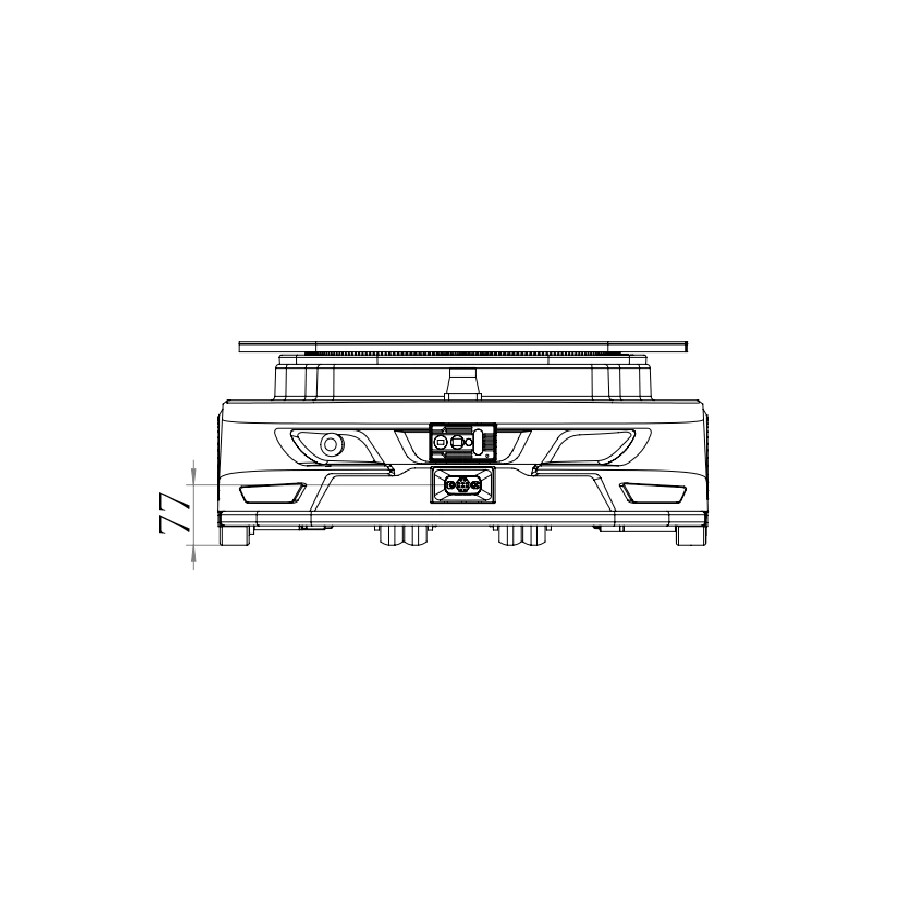
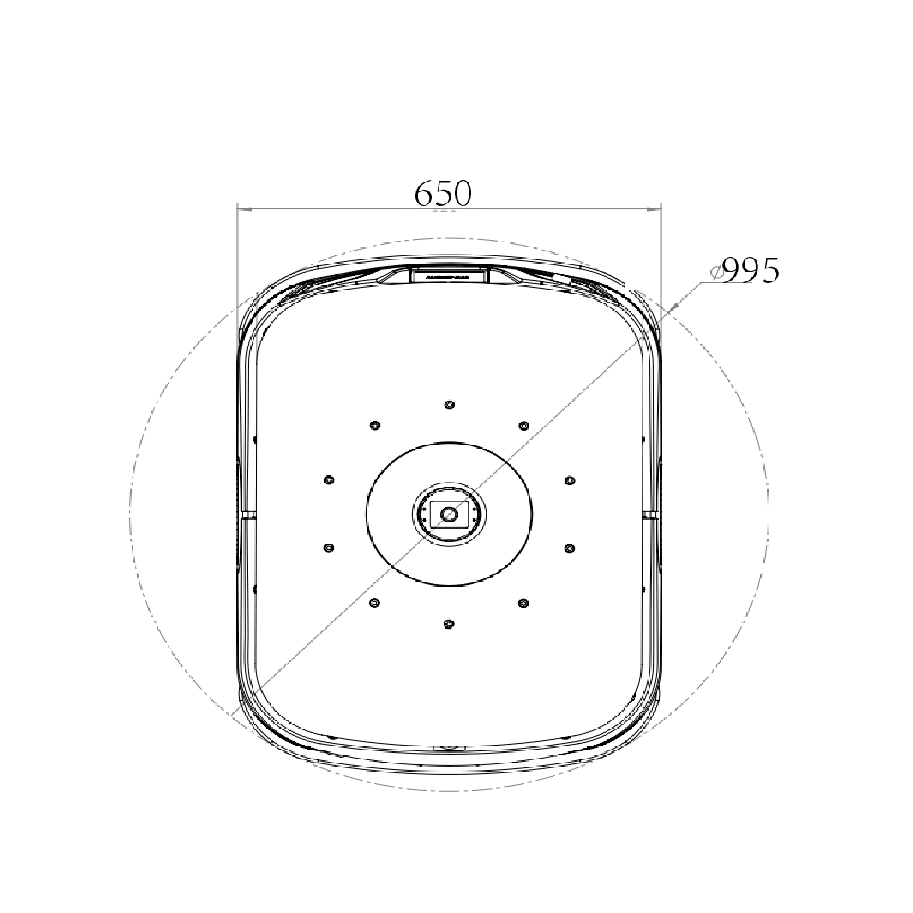
Nos robots de manutention sont dotés d'un châssis intégré moulé sous pression, d'une conception modulaire et d'une capacité de 600 kg. Grâce à la navigation par SLAM laser et par code QR, ils garantissent un positionnement précis. La conception de levage avancée permet un arrimage stable. Équipés de contrôleurs principaux, d'un système de chargement autonome et d'un système de vision 3D pour éviter les obstacles, ils améliorent la productivité. Idéaux pour divers secteurs d'activité, ils prennent en charge les opérations 24 heures sur 24 et 7 jours sur 7 pour des flux de travail efficaces “de la marchandise à la personne”.