Capteur de vision 3D
Série S
Série M
Série V
Série H
Robots mobiles de vision (VMR)
Robots mobiles
AMR
FMR
TMR
Matériel et logiciels
Contrôleur central pour AMRs
Plate-forme de robot humanoïde
OmniHead
Logiciels
MCS
RCS
Robots humanoïdes
VB1
VB1-I
VB2
Solutions
3C Electronics
Automobile
Nouvelles énergies (batteries/photovoltaïque)
Emballage et impression
À propos de Lanxin
Notre histoire
Actualités
Nous contacter
Téléchargements
Capteur de vision 3D
Série S
Série M
Série V
Série H
Robots mobiles de vision (VMR)
Robots mobiles
AMR
FMR
TMR
Matériel et logiciels
Contrôleur central pour AMRs
Plate-forme de robot humanoïde
OmniHead
Logiciels
MCS
RCS
Robots humanoïdes
VB1
VB1-I
VB2
Solutions
3C Electronics
Automobile
Nouvelles énergies (batteries/photovoltaïque)
Emballage et impression
À propos de Lanxin
Notre histoire
Actualités
Nous contacter
Téléchargements
Conception
Anthropomorphique
Flexible
Conception intégrée ergonomique
VUE D'ENSEMBLE
SPECS TECH
CARACTÉRISTIQUES
DEMANDER UN DEVIS
Vue d'ensemble
Spécifications techniques
0.2~2m
Hauteur de fonctionnement
2~3h
Autonomie de la batterie
6
Articulations du bras
2kg
Charge de préhension
580mm
Diamètre de rotation
SLAM laser 3D
Méthode de navigation
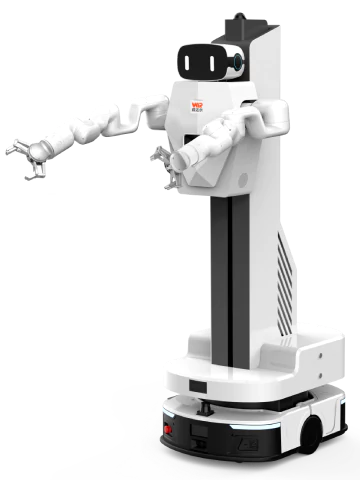
Nom
Robot humanoïde
Modèle
VB1-I
Dimensions
700x610x1650 mm
Garde au sol
30 mm
Température de fonctionnement
0~40℃
Vitesse
0~1,5 m/s
Mode de conduite
Moteur différentiel à deux roues
Humidité
10~90% RH, sans condensation
Caractéristiques
Conception anthropomorphique flexible
Système de vision panoramique RGB-D à profondeur
Plateforme de mobilité omnidirectionnelle à haute dextérité
Gestion intelligente de l’énergie pour une autonomie prolongée
Hub d’interaction IA multimodal
French
English
Japanese
Korean
German
Thai
Spanish