Plataforma robótica humanoide omnidireccional 4WS/4WD con un solo LiDAR
Admite sin problemas cuerpos humanoides plegables y elevables con funciones integradas de localización, navegación y evitación de obstáculos. Adecuado para oficinas, salas de exposiciones, logística industrial y asistencia a domicilio.
CARACTERÍSTICAS
Movilidad omnidireccional
El diseño de cuatro ruedas y cuatro direcciones permite un movimiento de radio de giro cero con movimientos laterales, diagonales y curvos a velocidades de hasta 1,5 m/s.
Despliegue rápido
La navegación SLAM basada en LiDAR 3D no requiere marcadores ni modificaciones del emplazamiento, y ofrece una precisión de posicionamiento de ±10 mm.
Sistema central interno
El controlador principal y los módulos de desarrollo propio garantizan una alta integración, estabilidad y fiabilidad a largo plazo.
Larga resistencia
Alimentada por una batería LiFePO₄ de 48V / 50Ah y un sistema de control del motor de bajo consumo, ofrece un tiempo de funcionamiento prolongado de hasta 4-6 horas con una sola carga.
Interfaces ampliables
Las interfaces mecánicas, eléctricas y de software reservadas permiten la integración personalizada con cuerpos robóticos humanoides.
Eficacia y productividad
Admite múltiples métodos de carga autónoma, como la programada, la de punto fijo y la de retorno a casa de bajo consumo.
ESPECIFICACIONES TÉCNICAS
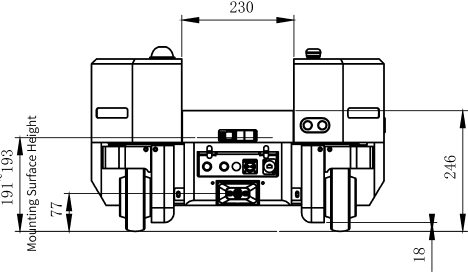
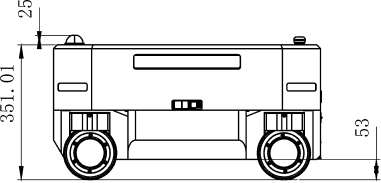
VISTA LATERAL
VISTA FRONTAL
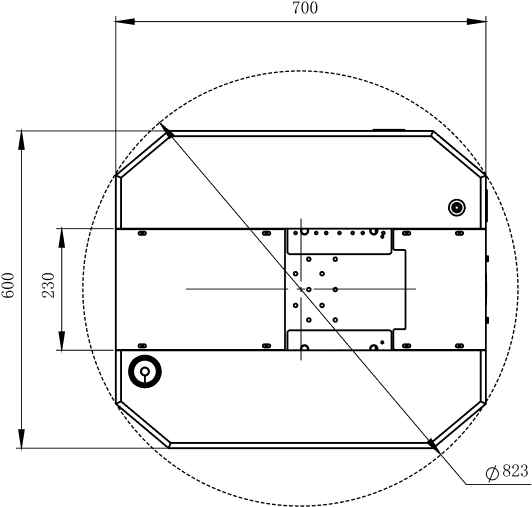
VISTA ARRIBA
100
Carga nominal (kg)
4~6h
Duración de la batería (típica a temperatura ambiente)
1~1,5m/s
Velocidad
1
Número de láseres 3D
Conceptos básicos
Configuración
Chasis con ruedas
Dimensiones
700 mm × 600 mm × 351 mm (largo × ancho × alto)
Altura de la superficie de montaje
191 mm
Diámetro de rotación
Φ825mm
Peso neto
≤80kg
Carga nominal
100 kg
Capacidades
Altura de elevación
60 mm
Carga de elevación nominal
400 kg
Carga de remolque nominal
-
Rotación flexible
Estándar, girar carga / robot sólo o ambos
Seguridad
Medidas de protección
Prevención de colisiones en tres niveles: deceleración, parada gradual, freno de emergencia.
Sorteo de obstáculos con láser
Ayuda
Visión 3D Evitación de obstáculos
Ayuda
Número de cámaras
4
Radar ultrasónico
No se admite
Número de radares ultrasónicos
NA
Banda de seguridad
No se admite
Botón de parada de emergencia
Ayuda
Alarma audiovisual
Ayuda
Movimiento
Modo de conducción
Cuatro ruedas omnidireccionales de cuatro direcciones
Modo Navegación
SLAM láser 3D
Dirección de conducción
Marcha omnidireccional
Velocidad
0~2,0 m/s
Número de láseres 3D
1
Velocidad
1~1,5m/s
Precisión de navegación
±10mm
Precisión del ángulo de tope
±1°
Batería
Tipo de batería
LFP
Capacidad de la batería
DC48V/50Ah
Duración de la batería
4~6h(típico a temperatura ambiente)
Método de carga
Carga automática / manual
Tiempo de carga
≤2.5h
Ciclo de vida
1500 ciclos
Interfaces externas
Puerto Ethernet
RJ45×1
Alimentación
DC48V/30A
E/S
Soporte (parada de emergencia, banda luminosa)
Medio ambiente
Escena
Interior
Temperatura de funcionamiento
0~40℃
Humedad
10~90%RH, sin condensación
Pendiente del terreno
≤10°
Altura libre de obstáculos
≤10 mm
Anchura de la zanja
≤10 mm
Aire
Sin polvo ni gases inflamables, explosivos o corrosivos