

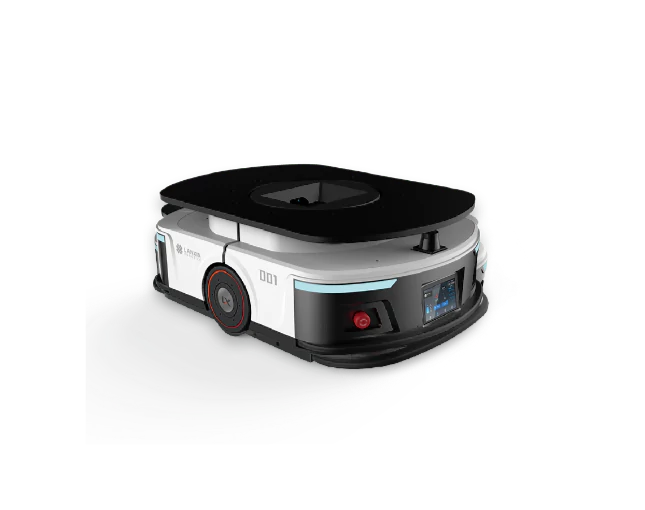
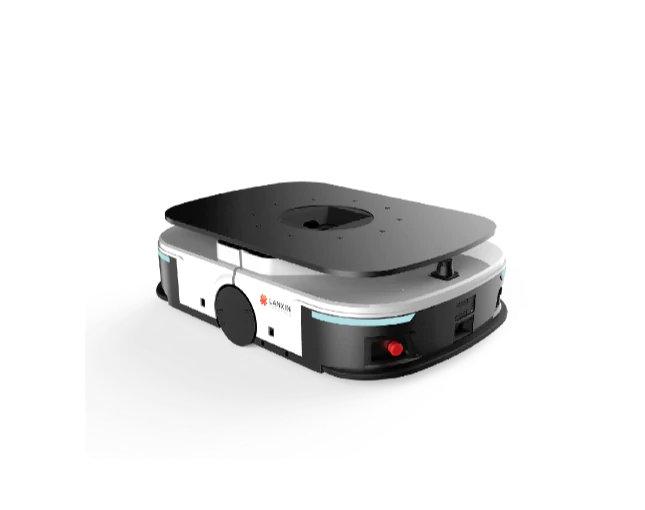
Robot mobile autonome
Basé sur les technologies d'automatisation 3D et de navigation autonome de Lanxin, le Lanxin AMR possède des capacités telles que l'évitement autonome des obstacles, un positionnement précis et une programmation flexible. Sans intervention humaine, il peut assurer une manutention et une rotation efficaces des matériaux, ce qui le rend adapté à divers scénarios de production industrielle et de passerelle.
Agile et précis, grande compatibilité,Compact et efficace
Caractéristiques
Évitement intelligent des obstacles
Avec le LX-MRDVS®, le robot détecte les obstacles de manière panoramique à 360° grâce à la vision 3D et à l'IA, ce qui garantit une navigation plus sûre et plus intelligente.
Noyau auto-développé
Piloté par le contrôleur central développé par Lanxin, le robot garantit des performances stables et fiables dans n'importe quel environnement.
Navigation naturelle SLAM
Aucune configuration supplémentaire n'est nécessaire, il est prêt à l'emploi. Grâce à la reconnaissance sémantique avancée, le robot détecte intelligemment les obstacles statiques et dynamiques et passe en toute transparence de l'arrêt à l'évitement.
Compatibilité supérieure
Permet l'intégration avec des rouleaux, des racks et des conteneurs de sécurité. Offre une large gamme d'interfaces pour un déploiement flexible dans de multiples scénarios.
Produits
Hauteur de levage (mm)
Charge nominale (kg)
Mode navigation
Autonomie de la batterie (h)
Diamètre de rotation (mm)
Pente de la route (°)
| Dimensions (L*L*H) | Mode de conduite |
| 775L*540W*260Hmm | Différentiel à deux roues |
| Poids net | Vitesse de déplacement |
| 90 kg | 0~2.0m/s |
| Transfert de charge sans déplacement | Scénario d'application |
| Soutenu | Intérieur |
| Modes de mobilité | Précision du positionnement |
| Déplacement avant/arrière, rotation sur place, rotation gauche/droite | ±10mm |
Hauteur de levage (mm)
Charge nominale (kg)
Mode navigation
Autonomie de la batterie (h)
Diamètre de rotation (mm)
Pente de la route (°)
| Dimensions (L*L*H) | Mode de conduite |
| 945L*650W*260H mm | Différentiel à deux roues |
| Poids net | Vitesse de déplacement |
| 110 kg | 0~2.0m/s |
| Transfert de charge sans déplacement | Scénario d'application |
| Soutenu | Intérieur |
| Modes de mobilité | Précision du positionnement |
| Déplacement avant/arrière, rotation sur place, rotation gauche/droite | ±10mm |
Hauteur de levage (mm)
Charge nominale (kg)
Mode navigation
Autonomie de la batterie (h)
Diamètre de rotation (mm)
Pente de la route (°)

| Dimensions (L*L*H) | Mode de conduite |
| 1145L*815W*260H mm | Différentiel à deux roues |
| Poids net | Vitesse de déplacement |
| 190 kg | 2,0 m/s |
| Transfert de charge sans déplacement | Scénario d'application |
| Soutenu | Intérieur |
| Modes de mobilité | Précision du positionnement |
| Déplacement avant/arrière, rotation sur place, rotation gauche/droite | ±10mm |
Hauteur de levage (mm)
Charge nominale (kg)
Mode navigation
Autonomie de la batterie (h)
Diamètre de rotation (mm)
Pente de la route (°)
| Dimensions (L*L*H) | Mode de conduite |
| 1145L*815W*260H mm | Différentiel à deux roues |
| Poids net | Vitesse de déplacement |
| 200 kg | 2,0 m/s |
| Transfert de charge sans déplacement | Scénario d'application |
| Soutenu | Intérieur |
| Modes de mobilité | Précision du positionnement |
| Déplacement avant/arrière, rotation sur place, rotation gauche/droite | ±10mm |
Hauteur de levage (mm)
Charge nominale (kg)
Mode navigation
Autonomie de la batterie (h)
Diamètre de rotation (mm)
Pente de la route (°)

| Dimensions (L*L*H) | Mode de conduite |
| 1500L*1200W*360H mm | Différentiel à deux roues |
| Poids net | Vitesse de déplacement |
| 500 kg | 0~1,5m/s |
| Transfert de charge sans déplacement | Scénario d'application |
| Soutenu | Intérieur |
| Modes de mobilité | Précision du positionnement |
| Déplacement avant/arrière, rotation sur place, rotation gauche/droite | ±10mm |
Hauteur de levage (mm)
Charge nominale (kg)
Mode navigation
Autonomie de la batterie (h)
Diamètre de rotation (mm)
Pente de la route (°)

| Dimensions (L*L*H) | Largeur du bras de fourche (intérieur/extérieur) |
| 1386L×1036W×245H mm | 246mm/642mm |
| Poids net | Distance d'extension des fourches |
| 400 kg | 1220mm |
| Garde au sol du bras de fourche | Vitesse de déplacement |
| 90mm | 0~1,5 m/s |
| Précision de la navigation | Vision 3D Évitement des obstacles |
| ±20mm | Soutien |
Hauteur de franchissement des obstacles (mm)
Charge nominale (kg)
Mode navigation
Autonomie de la batterie (h)
Diamètre de rotation (mm)
Pente de la route (°)

| Dimensions (L*L*H) | Mécanisme d'entraînement |
| L950*L650*H400mm | Entraînement omnidirectionnel |
| Poids net | Vitesse de déplacement |
| ≤150kg | 0~1,5m/s |
| Navigation par code QR | Scénario d'application |
| En option | Intérieur |
| Direction de la conduite | Précision du positionnement |
| Mouvement rectiligne avant/arrière, mouvement latéral gauche/droite, rotation sur place, virage gauche/droite | ±5mm (navigation par code QR) |
Cas
SHARP Dynabook Laptop Factory Intelligent Logistics (logistique intelligente)
Livraison des matières premières de l'entrepôt du premier étage à l'atelier de production d'ordinateurs portables du deuxième étage, ainsi que la collecte et le retour des déchets.
Application
Électronique & Électrique
Navigation autonome grâce à la technologie SLAM - aucune modification de l'infrastructure n'est nécessaire. Notre IA sémantique propriétaire classe dynamiquement les obstacles (statiques/dynamiques) et exécute des stratégies d'évitement en fonction du contexte.