




Conception intégrée de pointe pour des solutions logistiques stables, modulaires et intelligentes.
Nos robots de manutention sont dotés d'un châssis intégré moulé sous pression et de conceptions modulaires pour une meilleure stabilité. Grâce à la navigation laser SLAM, ils se déploient sans effort et sans marqueurs. Les modules de châssis personnalisables permettent une intégration transparente avec les systèmes sur site. Les contrôleurs principaux prennent en charge le chargement autonome et les opérations 24 heures sur 24, 7 jours sur 7, ce qui est idéal pour les usines et les entrepôts, avec une capacité allant jusqu'à 400 kg.
Utilise le SLAM laser 3D pour le positionnement et la navigation autonomes, ne nécessitant pas de marqueurs ni de modifications du site, ce qui rend le déploiement plus pratique.
Différentes unités commerciales, telles que les rouleaux et les transporteurs, peuvent être intégrées sur la base du module de châssis standard, ce qui permet une personnalisation rapide.
Permet une application interrégionale en se connectant physiquement ou en réseau et en interagissant avec des systèmes tels que les portes et les ascenseurs dans l'environnement de l'application.
Il utilise des modules principaux de contrôle et de gestion développés de manière indépendante, offrant un haut niveau d'intégration, de stabilité et de fiabilité.
Prend en charge plusieurs méthodes de charge autonome, telles que la charge programmée, la charge à point fixe et la charge de retour à domicile à faible consommation d'énergie.
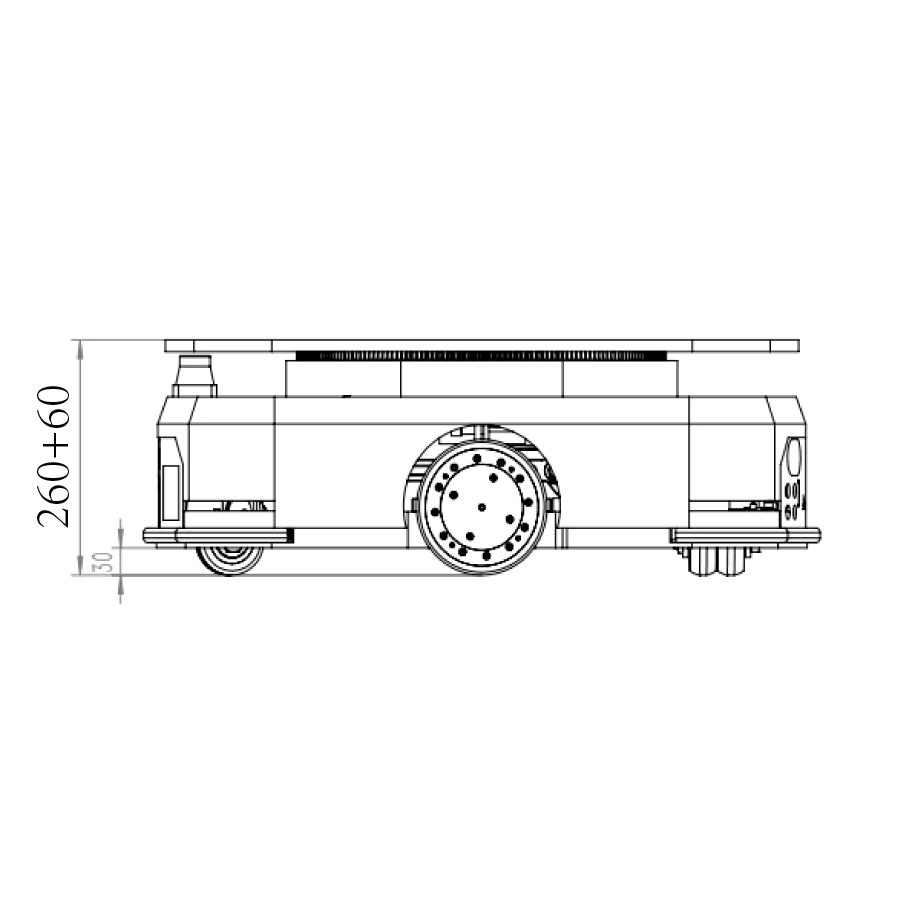
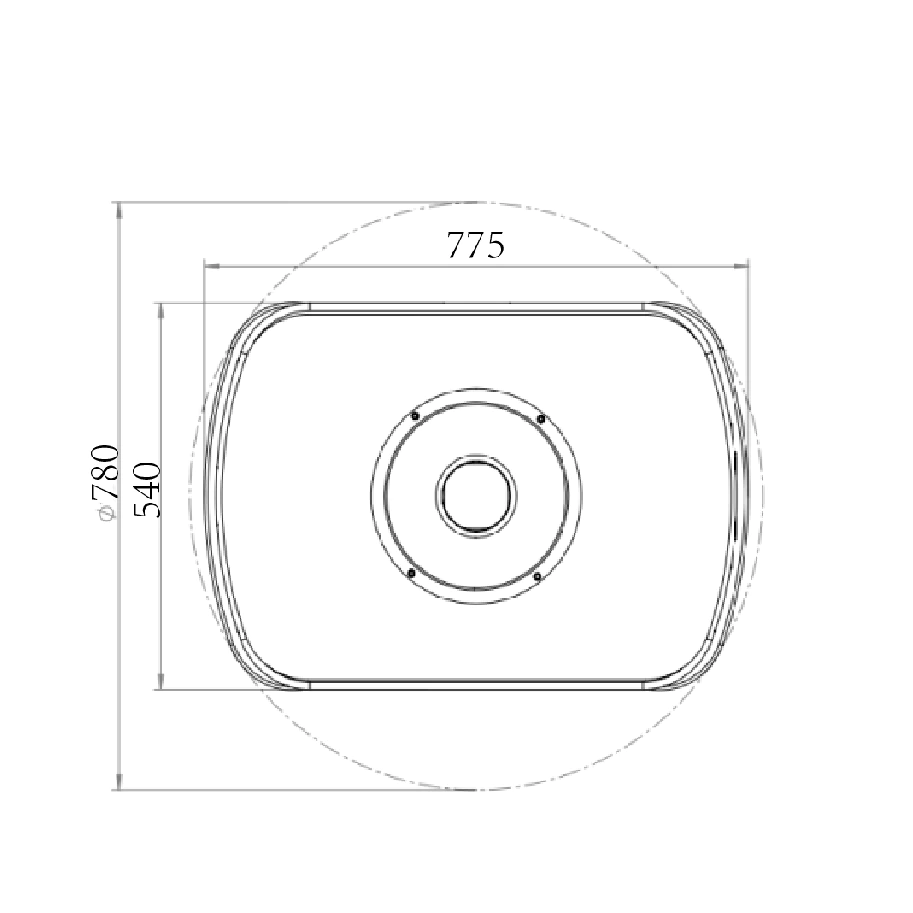
| Dimensions (L*L*H) | 775 mm * 540 mm * 260 mm |
| Poids net | 90 kg |
| Diamètre de rotation | φ995 mm |
| Hauteur de levage | 60 mm |
| Charge de levage nominale | 400 kg |
| Charge nominale de remorquage | - |
| Rotation flexible | Standard, rotation de la charge / du robot uniquement ou des deux |
| Gamme de protection | Couverture à 360 |
| Mesures de protection | Protection à trois niveaux : décélération, arrêt progressif, arrêt d'urgence |
| Évitement d'obstacles par laser | Couverture à 360° par les lasers avant et arrière |
| Bordure de sécurité | Protection intégrale |
| Bouton d'arrêt d'urgence | Portée d'une seule main autour du robot |
| Alarme audiovisuelle | Indication lumineuse + message audio |
| Vision 3D Évitement des obstacles | Standard |
| Mode de conduite | Entraînement différentiel à deux roues |
| Mode navigation | Navigation naturelle |
| Direction de la conduite | Avancer, reculer, tourner, tourner à gauche / à droite |
| Vitesse | 0~2,0 m/s |
| Précision de la navigation | ±10mm |
| Précision de l'amarrage | ±5mm |
| Type de batterie | LFP |
| Capacité de la batterie | 48V 21AH |
| Autonomie de la batterie | ≥8h |
| Méthode de chargement | Chargement automatique / manuel |
| Temps de charge | ≤1.5h |
| Cycle de vie | 2000 cycles |
| Panneau LCD | En option |
| Indication lumineuse | État du robot, alarme de défaut, puissance de la batterie, etc. |
| Promesse sonore | Turing, alerte, lecture de musique, etc. |
| Fonctionnement des boutons | Bouton d'arrêt d'urgence, bouton de mise sous tension, bouton de fonctionnement |
| Interface d'expansion | USB2.0 + RJ45(100MB) |
| Scénarios d'application | Intérieur |
| Température de fonctionnement | 0~40℃ |
| Humidité | 10~90%RH, pas de condensation |
| Pente du sol | ≤ 5% / 3° |
| Largeur de l'écart | ≤ 20 mm |
| Air | Pas de poussière, pas de gaz inflammables, explosifs ou corrosifs |
| Communication en réseau | WiFi IEEE802.11 a/b/g/n/ac/ax, 5G (en option) |
Siège social : 7-802, China Artificial Intelligence Town, n° 1818-2, Wenyi West Road, Hangzhou, province du Zhejiang, Chine
Bureau du Japon : Lanxin Robotics Japan Co., Ltd. 2-27-4 Uchida, Minami-ku, Nagoya, Préfecture d’Aichi, Japon
marketing@lanxincn.com