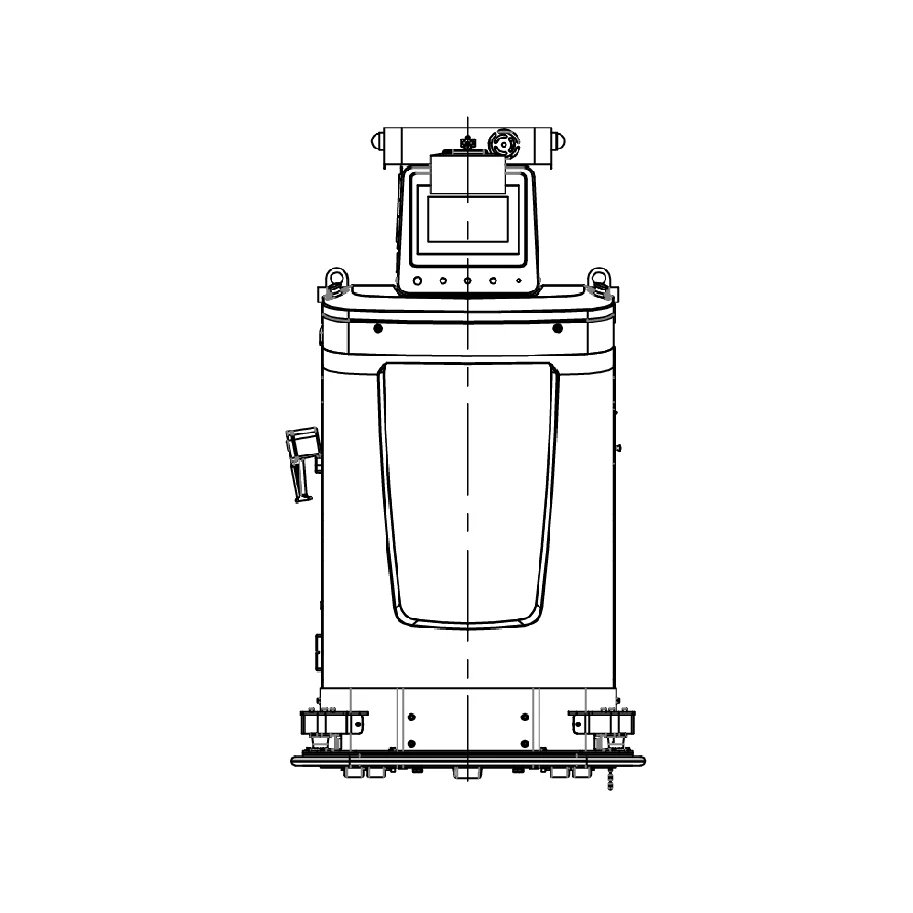
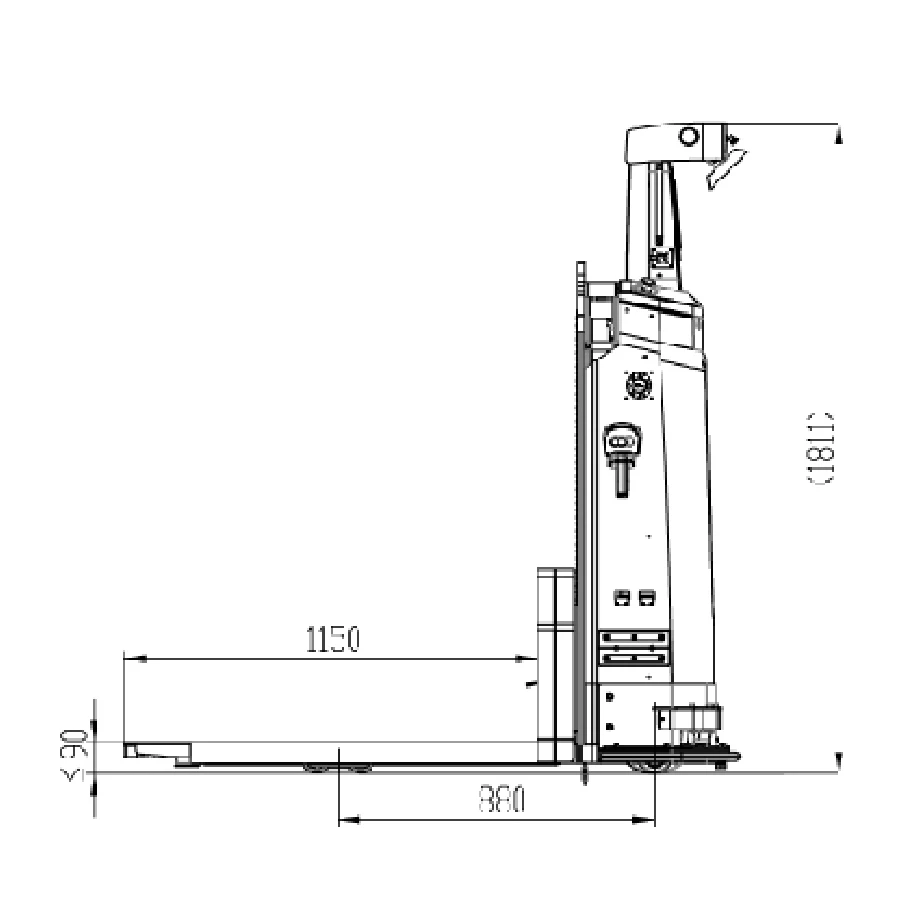
การจัดการที่แม่นยำเพื่อประสิทธิภาพและความปลอดภัยที่ไม่มีใครเทียบได้ หุ่นยนต์จัดการอัจฉริยะ VMR-FL21403S มอบความแม่นยำและความน่าเชื่อถือสูงด้วยอัลกอริธึมการมองเห็นขั้นสูง ปรับตัวได้อย่างอิสระสำหรับพาเลทที่ไม่สม่ำเสมอโดยใช้การนำทางตามธรรมชาติและการมองเห็น 3 มิติ มาพร้อมกับ LiDAR และคุณสมบัติด้านความปลอดภัย เพื่อให้มั่นใจในการปกป้อง 360°การชาร์จอัตโนมัติช่วยให้สามารถทำงานต่อเนื่องได้ตลอด 24 ชั่วโมง 7 วันต่อสัปดาห์ รองรับน้ำหนักได้สูงสุดถึง 3,500 มิลลิเมตร เพื่อการจัดการโลจิสติกส์ที่มีประสิทธิภาพในธุรกิจอีคอมเมิร์ซและคลังสินค้าโรงงาน.
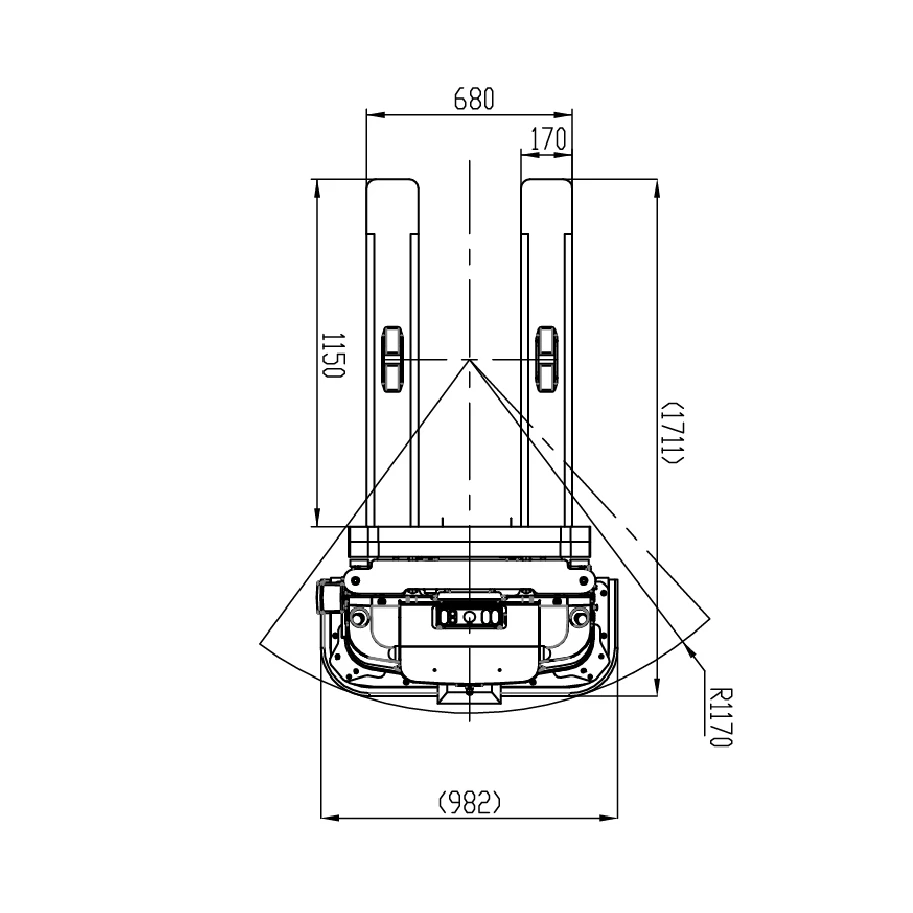
ด้วยการใช้ชุดอัลกอริทึมภาพที่มีความแม่นยำสูง สามารถระบุตำแหน่งพาเลทได้อย่างชาญฉลาดและปรับทิศทางของงาให้เหมาะสม แม้ในกรณีที่พาเลทถูกวางอย่างไม่เป็นระเบียบหรือวางแบบสุ่ม.
การขนส่งอัตโนมัติ: โดยอาศัยการแผนที่และการระบุตำแหน่งผ่านลักษณะทางสิ่งแวดล้อมตามธรรมชาติ สามารถนำทางและวางแผนเส้นทางได้ด้วยตัวเองโดยไม่ต้องใช้รางหรือจุดสังเกต.
ติดตั้งระบบความปลอดภัยหลายระดับ เช่น ระบบมองเห็น 3 มิติ, LiDAR, ปุ่มหยุดฉุกเฉิน, และบาร์ป้องกันการชน, ทำให้มั่นใจได้ถึงการป้องกันความปลอดภัยแบบรอบทิศทาง 360° อย่างครอบคลุม.
ติดตั้งด้วยระบบชาร์จอัตโนมัติ สามารถชาร์จตัวเองได้เมื่อแบตเตอรี่ต่ำหรือชาร์จเสร็จตามเวลาที่กำหนด.