



ความแม่นยำ ความปลอดภัย และประสิทธิภาพสำหรับโลจิสติกส์อัจฉริยะตลอด 24/7 หุ่นยนต์ VMR-FL22003C มีความสามารถในการรับน้ำหนัก 2000 กิโลกรัม และยกสูงถึง 4500 มิลลิเมตร ใช้ระบบวิสัยทัศน์ความแม่นยำสูงในการปรับให้เข้ากับพาเลทที่ไม่สม่ำเสมอ เดินทางได้โดยไม่ต้องใช้เครื่องหมาย และวางแผนเส้นทางได้ด้วยตัวเอง มาพร้อมกับระบบวิสัยทัศน์ 3D, LiDAR และคุณสมบัติด้านความปลอดภัย ทำให้มั่นใจได้ถึงการป้องกัน 360°การชาร์จอัตโนมัติรองรับการทำงานต่อเนื่องตลอด 24 ชั่วโมงทุกวัน เหมาะอย่างยิ่งสำหรับงานที่มีความถี่สูงในธุรกิจอีคอมเมิร์ซและคลังสินค้า.
ใช้ 알고ริทึมการมองเห็นที่มีความแม่นยำสูงเพื่อค้นหาตำแหน่งของพาเลทอย่างชาญฉลาดและปรับทิศทางของฟอร์กให้เหมาะสม แม้ในกรณีที่พาเลทถูกจัดวางอย่างไม่สม่ำเสมอหรือไม่เป็นระเบียบ.
จากการทำแผนที่และการกำหนดตำแหน่งโดยใช้ลักษณะทางสิ่งแวดล้อมตามธรรมชาติ สามารถนำทางและวางแผนเส้นทางได้อย่างอิสระโดยไม่ต้องใช้เส้นทางหรือจุดสังเกต.
มาตรการความปลอดภัยหลายระดับ รวมถึงระบบวิชั่น 3 มิติ, LiDAR, ปุ่มหยุดฉุกเฉิน และแถบป้องกันการชน ให้การปกป้องความปลอดภัยแบบสเตอริโอรอบทิศทาง 360°.
ติดตั้งด้วยระบบชาร์จอัตโนมัติ สามารถชาร์จตัวเองได้เมื่อแบตเตอรี่ต่ำหรือชาร์จเสร็จตามเวลาที่กำหนด.
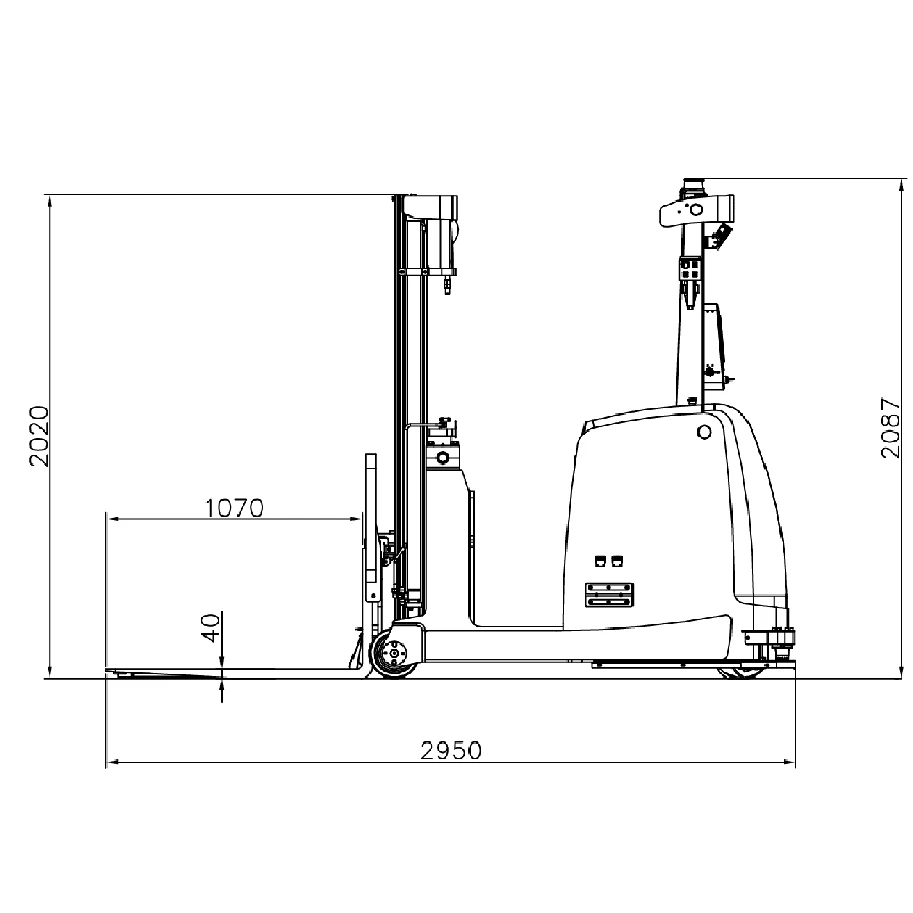
| ขนาด (ยาว*กว้าง*สูง) | 2950L*1120W*2100H มม. |
| น้ำหนักสุทธิ | 3100 กิโลกรัม |
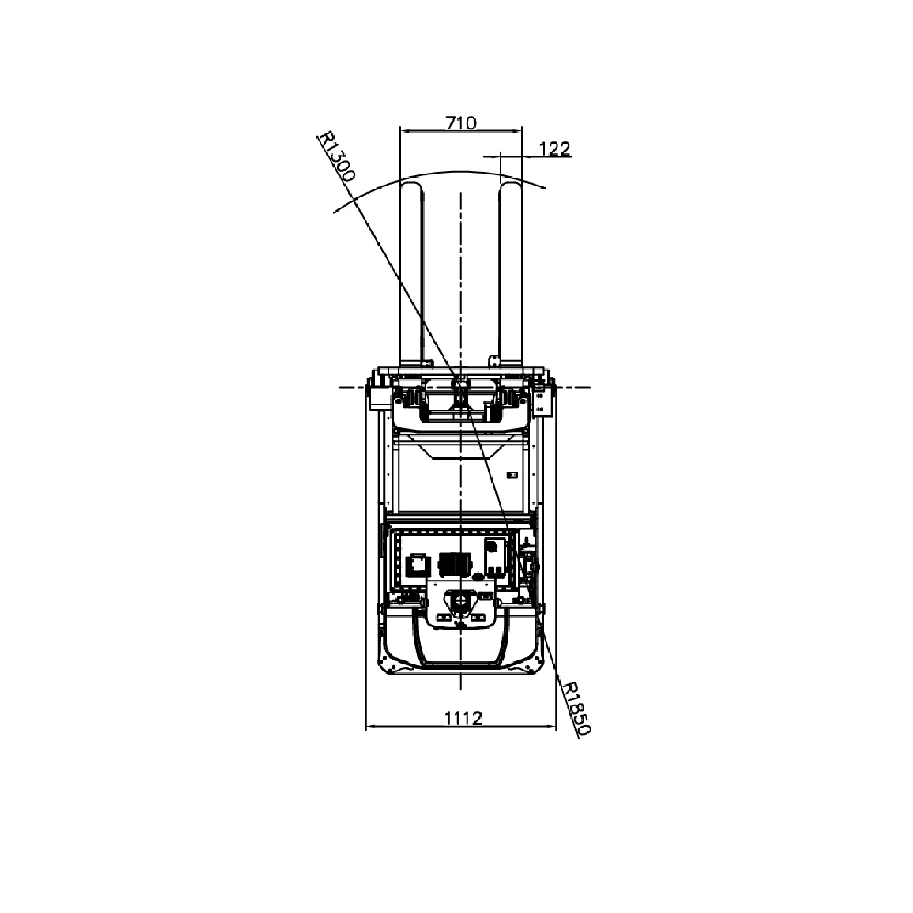
| เส้นผ่านศูนย์กลางการหมุน | เส้นผ่านศูนย์กลาง 3,600 มิลลิเมตร |
| โหลดที่กำหนด | น้ำหนักสูงสุด 2000 กิโลกรัม |
| ความสูงในการยก | 3000 มม. (สูงสุด 4500 มม.) |
| ระยะห่างศูนย์โหลด | 500 มิลลิเมตร |
| ขนาดของส้อม (ยาว*กว้าง*สูง) | 1070L*122W*40H มม. * 2 |
| ความกว้างด้านนอกของส้อม | 710 มิลลิเมตร |
| ช่วงการป้องกัน | ครอบคลุม 360° |
| มาตรการป้องกัน | การป้องกันสามระดับ: การลดความเร็ว, การหยุดอย่างค่อยเป็นค่อยไป, การหยุดฉุกเฉิน |
| ระบบหลีกเลี่ยงสิ่งกีดขวางด้วยเลเซอร์ | เซ็นเซอร์เลเซอร์สามตัวที่ด้านหน้าและด้านหลัง ให้การครอบคลุม 360° อย่างเต็มรูปแบบ |
| ขอบนิรภัย | การปกป้องแบบครึ่งหน้า |
| ปุ่มหยุดฉุกเฉิน | ระยะที่มือทั้งสองข้างสามารถเอื้อมรอบหุ่นยนต์ได้ |
| สัญญาณเตือนภัยแบบภาพและเสียง | สัญญาณไฟ + เสียงแจ้งเตือน |
| ระบบหลีกเลี่ยงสิ่งกีดขวางด้วยภาพสามมิติ | การสนับสนุน |
| โหมดขับขี่ | พวงมาลัยขับเดี่ยว |
| โหมดการนำทาง | การนำทางตามธรรมชาติ, การมองเห็น / SLAM ด้วยเลเซอร์ |
| เส้นทางขับรถ | ไปข้างหน้า, ถอยหลัง, หมุน, เลี้ยวซ้าย / ขวา |
| ความเร็ว | 0~1.5 เมตรต่อวินาที |
| ความแม่นยำในการเชื่อมต่อท่าเทียบ | ±10 มม. |
| ความแม่นยำของจุดหยุด | ±1° |
| ประเภทแบตเตอรี่ | LFP |
| ความจุแบตเตอรี่ | 24V 270AH |
| อายุการใช้งานแบตเตอรี่ | 6-8 ชั่วโมง |
| วิธีการชาร์จ | ชาร์จอัตโนมัติ / ชาร์จด้วยตนเอง |
| เวลาชาร์จ | ≤3 ชั่วโมง |
| วงจรชีวิต | 2000 รอบ |
| แผงจอ LCD | ตัวเลือก |
| สัญญาณไฟ | สถานะของหุ่นยนต์, การเตือนข้อผิดพลาด, กำลังไฟของแบตเตอรี่, เป็นต้น. |
| เสียงแจ้งเตือน | ทัวริง, เตือน, เล่นเพลง, เป็นต้น. |
| การกดปุ่ม | สวิตช์หยุดฉุกเฉิน, สวิตช์ และปุ่มควบคุมการทำงาน |
| รีโมทคอนโทรลแบบใช้มือ | การสนับสนุน |
| อินเตอร์เฟซการขยาย | RJ45(100MB) |
| สถานการณ์การใช้งาน | ในอาคาร |
| อุณหภูมิในการทำงานและความชื้น | 0~40 ℃/10~90%RH, ไม่เกิดการควบแน่น |
| ความลาดชันของพื้นดิน | ≤5% ไม่บรรทุก / 3% บรรทุกเต็ม |
| การสื่อสารเครือข่าย | WiFi IEEE802.11 a/b/g/n/ac/ax, 5G (ตัวเลือก) |
| ความกว้างทางเดินสำหรับวางสินค้าแบบมุมฉาก | 3600 มม. (สำหรับพาเลทขนาด 1200 * 1200) |
| ความกว้างของทางเดินสำหรับจอดเรือแบบจัดวางตรงกลาง | 3800 มม. (สำหรับพาเลทขนาด 1200 * 1200) |
| ความสามารถในการรับน้ำหนักของพื้น | ≥2100 กิโลกรัม/ตารางเมตร |
สำนักงานใหญ่: 7-802, เมืองปัญญาประดิษฐ์ ประเทศจีน เลขที่ 1818-2 ถนนเวินอี้ตะวันตก หางโจว เจ้อเจียง ประเทศจีน
สำนักงานญี่ปุ่น: บริษัท แลนซิน โรโบติกส์ ประเทศญี่ปุ่น จำกัด, 2-27-4 อุชิดะ, มินามิ-คุ, นาโกย่า, อิจิ, ประเทศญี่ปุ่น
marketing@lanxincn.com