

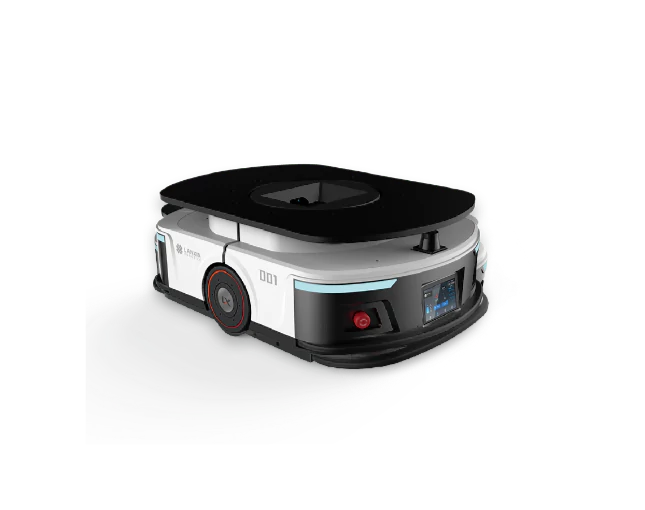
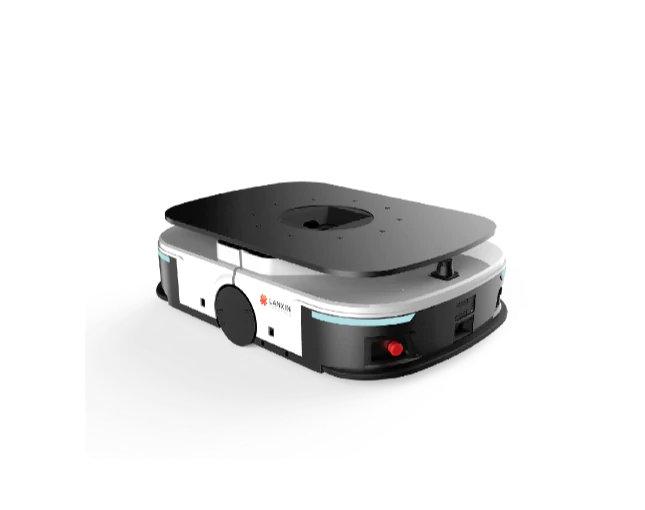
หุ่นยนต์เคลื่อนที่อัตโนมัติ
โดยอาศัยเทคโนโลยีระบบอัตโนมัติ 3 มิติและการนำทางอัตโนมัติของ Lanxin, Lanxin AMR มีความสามารถในการหลีกเลี่ยงสิ่งกีดขวางอัตโนมัติ, การกำหนดตำแหน่งที่แม่นยำ, และการจัดตารางเวลาที่ยืดหยุ่น โดยไม่ต้องมีการแทรกแซงจากมนุษย์, มันสามารถจัดการและหมุนเวียนวัสดุได้อย่างมีประสิทธิภาพ ทำให้เหมาะสมกับการผลิตอุตสาหกรรมและสถานการณ์ทางประตูต่างๆ.
คล่องตัวและแม่นยำ, เข้ากันได้สูง, กะทัดรัดและมีประสิทธิภาพ
คุณสมบัติ
ระบบหลีกเลี่ยงสิ่งกีดขวางอัจฉริยะ
ด้วย LX-MRDVS® หุ่นยนต์สามารถตรวจจับสิ่งกีดขวางรอบทิศทาง 360° ได้อย่างครอบคลุมผ่านเทคโนโลยีการมองเห็น 3 มิติและปัญญาประดิษฐ์ (AI) เพื่อการเคลื่อนที่ที่ปลอดภัยและชาญฉลาดยิ่งขึ้น.
พัฒนาขึ้นเอง
ขับเคลื่อนโดยตัวควบคุมหลักที่พัฒนาขึ้นเองของ Lanxin หุ่นยนต์นี้รับประกันประสิทธิภาพที่มั่นคงและเชื่อถือได้ในทุกสภาพแวดล้อม.
การนำทางตามธรรมชาติแบบ SLAM ที่แท้จริง
ไม่ต้องตั้งค่าเพิ่มเติม—พร้อมใช้งานทันทีเมื่อแกะกล่อง ด้วยระบบจดจำความหมายขั้นสูง หุ่นยนต์สามารถตรวจจับสิ่งกีดขวางทั้งแบบคงที่และแบบเคลื่อนไหวได้อย่างชาญฉลาด และเปลี่ยนการหยุดหรือหลบหลีกได้อย่างราบรื่น.
ความเข้ากันได้เหนือระดับ
รองรับการผสานการทำงานกับลูกกลิ้ง, ชั้นวาง, และภาชนะความปลอดภัย. ให้บริการช่วงกว้างของอินเตอร์เฟซสำหรับการPLOYMENTที่ยืดหยุ่นในหลายสถานการณ์.
ผลิตภัณฑ์
ความสูงในการยก (มม.)
น้ำหนักบรรทุกที่กำหนด (กก.)
โหมดการนำทาง
อายุการใช้งานแบตเตอรี่ (ชั่วโมง)
เส้นผ่านศูนย์กลางหมุน (มม.)
ความชันของถนน (°)
| ขนาด (ยาว*กว้าง*สูง) | โหมดขับขี่ |
| 775L*540W*260Hมม. | ดิฟเฟอเรนเชียลล้อคู่ |
| น้ำหนักสุทธิ | ความเร็วในการเดินทางขณะใช้งาน |
| 90 กิโลกรัม | 0~2.0 เมตร/วินาที |
| การถ่ายโอนโหลดโดยไม่ต้องเคลื่อนย้าย | สถานการณ์การใช้งาน |
| ได้รับการสนับสนุน | ในอาคาร |
| โหมดการเคลื่อนที่ | ความแม่นยำในการกำหนดตำแหน่ง |
| การเคลื่อนที่ไปข้างหน้า/ถอยหลัง การหมุนอยู่กับที่ การเลี้ยวซ้าย/ขวา | ±10 มม. |
ความสูงในการยก (มม.)
น้ำหนักบรรทุกที่กำหนด (กก.)
โหมดการนำทาง
อายุการใช้งานแบตเตอรี่ (ชั่วโมง)
เส้นผ่านศูนย์กลางหมุน (มม.)
ความชันของถนน (°)
| ขนาด (ยาว*กว้าง*สูง) | โหมดขับขี่ |
| 700L*600W*351H มม. | ดิฟเฟอเรนเชียลล้อคู่ |
| น้ำหนักสุทธิ | ความเร็วในการเดินทางขณะใช้งาน |
| 110 กิโลกรัม | 1~1.5 เมตรต่อวินาที |
| การถ่ายโอนโหลดโดยไม่ต้องเคลื่อนย้าย | สถานการณ์การใช้งาน |
| ได้รับการสนับสนุน | ในอาคาร |
| โหมดการเคลื่อนที่ | ความแม่นยำในการกำหนดตำแหน่ง |
| การเคลื่อนที่ไปข้างหน้า/ถอยหลัง การหมุนอยู่กับที่ การเลี้ยวซ้าย/ขวา | ±10 มม. |
ความสูงในการยก (มม.)
น้ำหนักบรรทุกที่กำหนด (กก.)
โหมดการนำทาง
อายุการใช้งานแบตเตอรี่ (ชั่วโมง)
เส้นผ่านศูนย์กลางหมุน (มม.)
ความชันของถนน (°)

| ขนาด (ยาว*กว้าง*สูง) | โหมดขับขี่ |
| 1145L*815W*260H มม. | ดิฟเฟอเรนเชียลล้อคู่ |
| น้ำหนักสุทธิ | ความเร็วในการเดินทางขณะใช้งาน |
| 190 กิโลกรัม | 2.0 เมตรต่อวินาที |
| การถ่ายโอนโหลดโดยไม่ต้องเคลื่อนย้าย | สถานการณ์การใช้งาน |
| ได้รับการสนับสนุน | ในอาคาร |
| โหมดการเคลื่อนที่ | ความแม่นยำในการกำหนดตำแหน่ง |
| การเคลื่อนที่ไปข้างหน้า/ถอยหลัง การหมุนอยู่กับที่ การเลี้ยวซ้าย/ขวา | ±10 มม. |
ความสูงในการยก (มม.)
น้ำหนักบรรทุกที่กำหนด (กก.)
โหมดการนำทาง
อายุการใช้งานแบตเตอรี่ (ชั่วโมง)
เส้นผ่านศูนย์กลางหมุน (มม.)
ความชันของถนน (°)
| ขนาด (ยาว*กว้าง*สูง) | โหมดขับขี่ |
| 1145L*815W*260H มม. | ดิฟเฟอเรนเชียลล้อคู่ |
| น้ำหนักสุทธิ | ความเร็วในการเดินทางขณะใช้งาน |
| 200 กิโลกรัม | 2.0 เมตรต่อวินาที |
| การถ่ายโอนโหลดโดยไม่ต้องเคลื่อนย้าย | สถานการณ์การใช้งาน |
| ได้รับการสนับสนุน | ในอาคาร |
| โหมดการเคลื่อนที่ | ความแม่นยำในการกำหนดตำแหน่ง |
| การเคลื่อนที่ไปข้างหน้า/ถอยหลัง การหมุนอยู่กับที่ การเลี้ยวซ้าย/ขวา | ±10 มม. |
ความสูงในการยก (มม.)
น้ำหนักบรรทุกที่กำหนด (กก.)
โหมดการนำทาง
อายุการใช้งานแบตเตอรี่ (ชั่วโมง)
เส้นผ่านศูนย์กลางหมุน (มม.)
ความชันของถนน (°)

| ขนาด (ยาว*กว้าง*สูง) | โหมดขับขี่ |
| 1500L*1200W*360H มม. | ดิฟเฟอเรนเชียลล้อคู่ |
| น้ำหนักสุทธิ | ความเร็วในการเดินทางขณะใช้งาน |
| 500 กิโลกรัม | 0~1.5 เมตรต่อวินาที |
| การถ่ายโอนโหลดโดยไม่ต้องเคลื่อนย้าย | สถานการณ์การใช้งาน |
| ได้รับการสนับสนุน | ในอาคาร |
| โหมดการเคลื่อนที่ | ความแม่นยำในการกำหนดตำแหน่ง |
| การเคลื่อนที่ไปข้างหน้า/ถอยหลัง การหมุนอยู่กับที่ การเลี้ยวซ้าย/ขวา | ±10 มม. |
ความสูงในการยก (มม.)
น้ำหนักบรรทุกที่กำหนด (กก.)
โหมดการนำทาง
อายุการใช้งานแบตเตอรี่ (ชั่วโมง)
เส้นผ่านศูนย์กลางหมุน (มม.)
ความชันของถนน (°)

| ขนาด (ยาว*กว้าง*สูง) | ความกว้างของแขนส้อม (ด้านใน/ด้านนอก) |
| 1386L×1036W×245H มม. | 246 มม./642 มม. |
| น้ำหนักสุทธิ | ระยะยืดของก้านกระบอกสูบ |
| 400 กิโลกรัม | 1220 มิลลิเมตร |
| ระยะห่างจากพื้นถึงก้านสวิงอาร์ม | ความเร็วในการเดินทางขณะใช้งาน |
| 90 มิลลิเมตร | 0~1.5 เมตรต่อวินาที |
| ความแม่นยำในการนำทาง | ระบบหลีกเลี่ยงสิ่งกีดขวางด้วยภาพสามมิติ |
| ±20 มม. | การสนับสนุน |
ความสูงในการเคลียร์สิ่งกีดขวาง (มม.)
น้ำหนักบรรทุกที่กำหนด (กก.)
โหมดการนำทาง
อายุการใช้งานแบตเตอรี่ (ชั่วโมง)
เส้นผ่านศูนย์กลางหมุน (มม.)
ความชันของถนน (°)

| ขนาด (ยาว*กว้าง*สูง) | กลไกการขับเคลื่อน |
| L950*W650*H400มม. | ขับเคลื่อนทุกทิศทาง |
| น้ำหนักสุทธิ | ความเร็วในการเดินทางขณะใช้งาน |
| ≤150 กิโลกรัม | 0~1.5 เมตรต่อวินาที |
| การนำทางด้วยรหัส QR | สถานการณ์การใช้งาน |
| ตัวเลือก | ในอาคาร |
| เส้นทางขับรถ | ความแม่นยำในการกำหนดตำแหน่ง |
| เคลื่อนที่ไปข้างหน้า/ถอยหลังในแนวตรง, เคลื่อนที่ด้านข้างซ้าย/ขวา, หมุนอยู่กับที่, เลี้ยวซ้าย/ขวา | ±5 มม. (นำทางด้วยรหัส QR) |
กรณี
โรงงานผลิตแล็ปท็อป SHARP Dynabook โลจิสติกส์อัจฉริยะ
การส่งมอบวัตถุดิบจากคลังสินค้าชั้นหนึ่งไปยังโรงงานผลิตแล็ปท็อปชั้นสอง พร้อมกับการเก็บรวบรวมและส่งคืนของเสีย.
การสมัคร
ไฟฟ้าและอิเล็กทรอนิกส์
การนำทางอัตโนมัติที่ขับเคลื่อนด้วยเทคโนโลยี SLAM แท้ – ไม่จำเป็นต้องปรับเปลี่ยนโครงสร้างพื้นฐานใดๆ ระบบปัญญาประดิษฐ์เชิงความหมายที่เป็นกรรมสิทธิ์ของเราสามารถจำแนกสิ่งกีดขวาง (ทั้งแบบคงที่และแบบเคลื่อนไหว) ได้อย่างไดนามิก และดำเนินการหลีกเลี่ยงตามกลยุทธ์ที่ตระหนักถึงบริบท.
