ปฏิวัติโลจิสติกส์ด้วยความแม่นยำ ความมั่นคง และความปลอดภัยอัจฉริยะ.
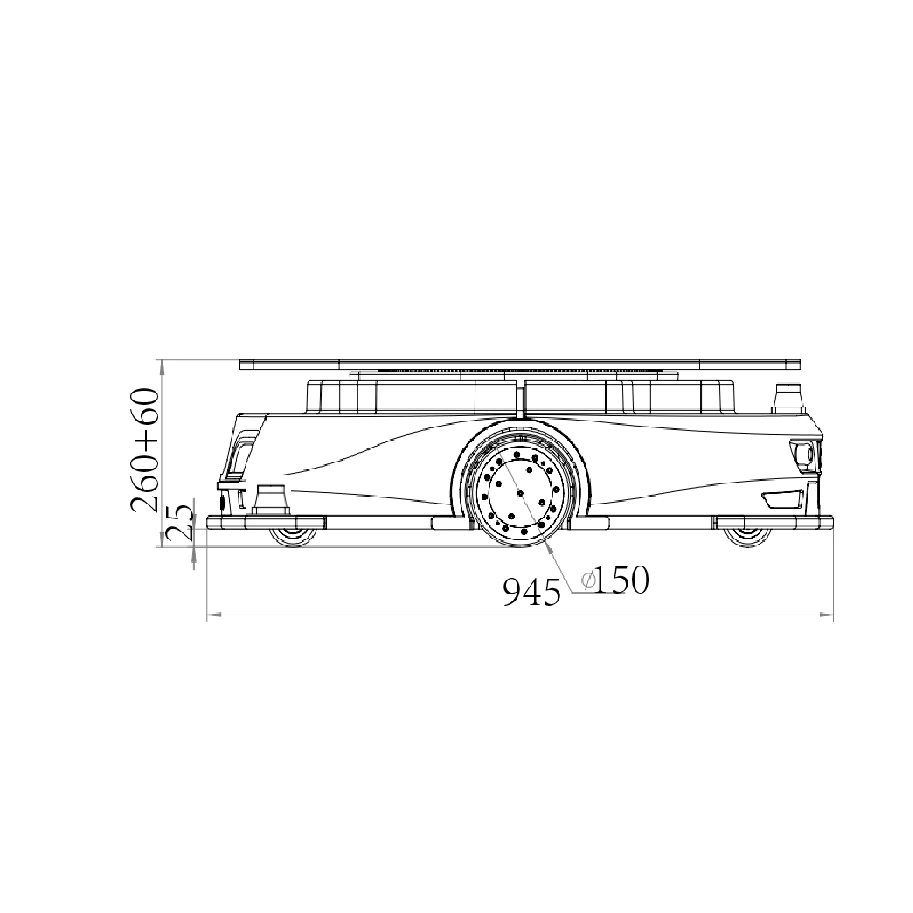
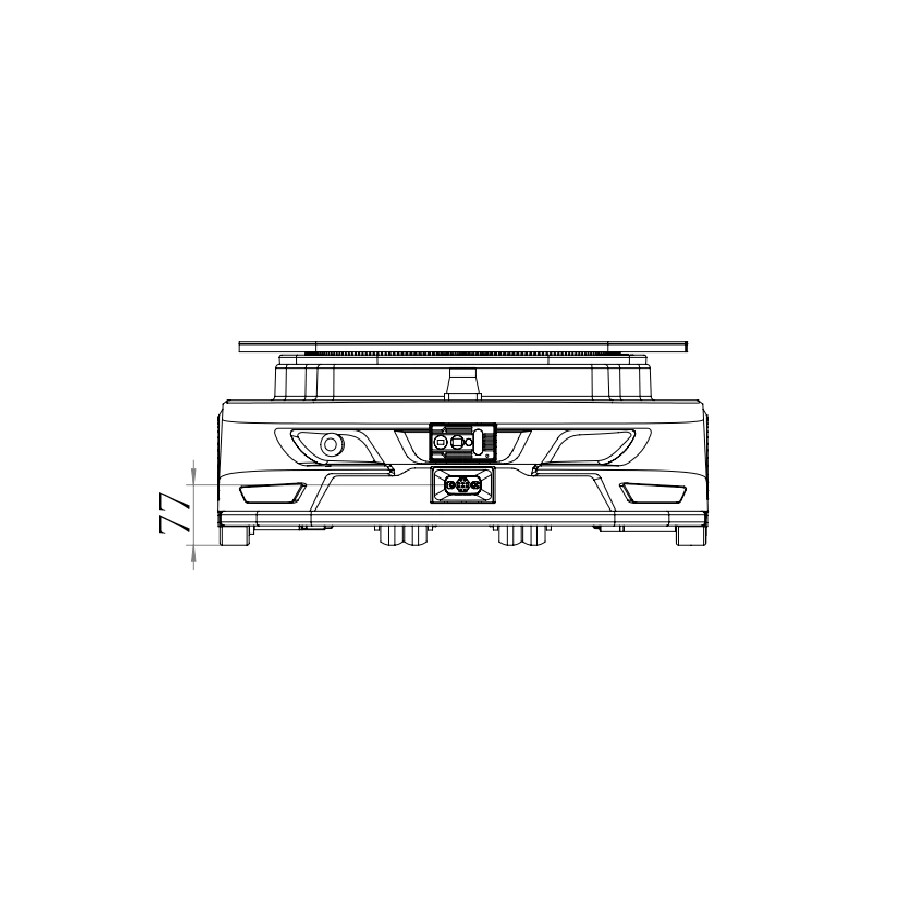
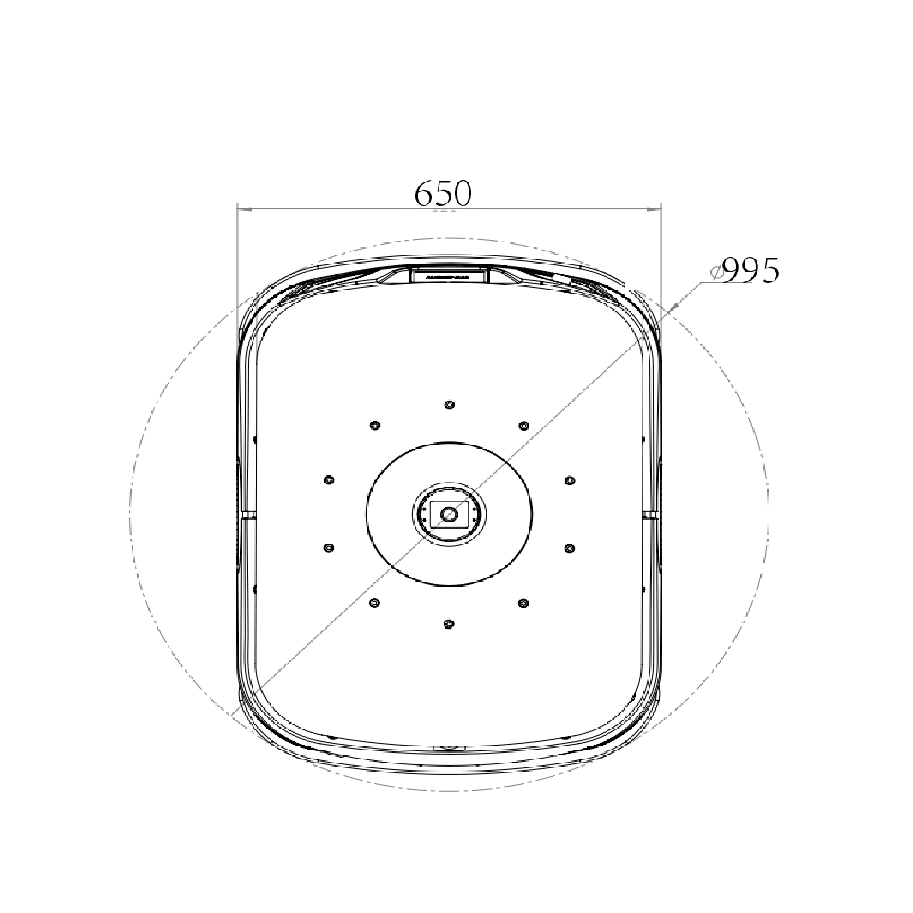
หุ่นยนต์จัดการวัสดุของเรามีโครงสร้างตัวถังหล่อขึ้นรูปแบบตายตัว การออกแบบแบบแยกส่วน และรองรับน้ำหนักได้ถึง 600 กิโลกรัม ด้วยระบบนำทางเลเซอร์ SLAM และรหัส QR ช่วยให้การวางตำแหน่งแม่นยำ การออกแบบการยกขั้นสูงรองรับการจอดที่มั่นคง ติดตั้งด้วยตัวควบคุมหลัก ระบบชาร์จอัตโนมัติ และระบบหลีกเลี่ยงสิ่งกีดขวางด้วยวิสัยทัศน์ 3 มิติ เพิ่มประสิทธิภาพการทำงาน เหมาะสำหรับอุตสาหกรรมต่างๆ รองรับการทำงานตลอด 24/7 เพื่อการทำงานแบบ “สินค้าถึงคน” ที่มีประสิทธิภาพ.