

高品質・導入しやすさ・安全性を追求
特長
インテリジェント障害物回避
LX-MRDVS®を搭載し、3DビジョンとAIにより360°全方位の障害物検知を実現。 安全性と走行の知能化を両立します。
自社開発コアコントローラ
LANXIN独自開発のコアコントローラにより、さまざまな環境下でも安定した信頼性の高い動作を実現します。
True SLAM ナチュラルナビゲーション
事前の追加設定は不要で、導入後すぐに使用可能。 高度なセマンティック認識により、静止物・移動物を的確に検知し、停止と回避を状況に応じて自動的に切り替えます。
優れた互換性
ローラ、ラック、安全コンテナなどとの連携に対応。 豊富なインタフェースを備え、複数シナリオでの柔軟なシステム構成が可能です。
製品一覧
リフト上昇高さ (mm)
リフト上昇負荷 (kg)
ナビゲーション方式
連続稼働時間(h)
回転直径 (mm)
路面勾配 (°)
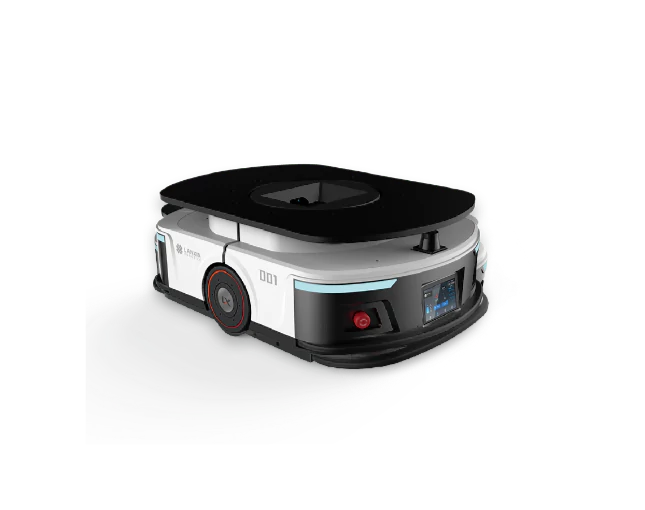
| 本体サイズ (L*W*H) | 駆動方式 |
| 775L*540W*260Hmm | 両輪速度差 |
| 本体重量 | 走行速度 |
| 90キロ | 0~2.0m/s |
| 荷物固定車両回転 | 場所 |
| 支持 | 室内 |
| 走行方法 | ドッキング精度 |
| 前後双方向、原地回転、左右回転 | ±10mm |
リフト上昇高さ (mm)
リフト上昇負荷 (kg)
ナビゲーション方式
連続稼働時間(h)
回転直径 (mm)
路面勾配 (°)
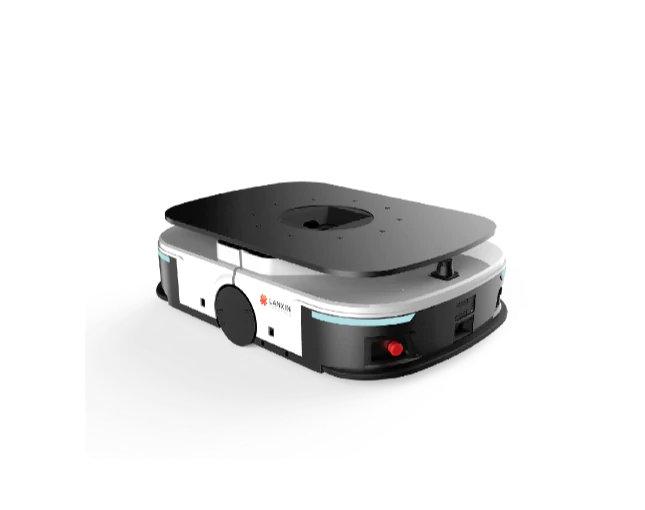
| 本体サイズ (L*W*H) | 駆動方式 |
| 945L*650W*260H mm | 両輪速度差 |
| 本体重量 | 走行速度 |
| 110kg | 0~2.0m/s |
| 荷物固定車両回転 | 場所 |
| 支持 | 室内 |
| 走行方法 | ドッキング精度 |
| 前後双方向、原地回転、左右回転 | ±10mm |
リフト上昇高さ (mm)
リフト上昇負荷 (kg)
ナビゲーション方式
連続稼働時間(h)
回転直径 (mm)
路面勾配 (°)

| 本体サイズ (L*W*H) | 駆動方式 |
| 1145L*815W*260H mm | 両輪速度差 |
| 本体重量 | 走行速度 |
| 190kg | 2.0m/s |
| 荷物固定車両回転 | 場所 |
| 支持 | 室内 |
| 走行方法 | ドッキング精度 |
| 前後双方向、原地回転、左右回転 | ±10mm |
リフト上昇高さ (mm)
リフト上昇負荷 (kg)
ナビゲーション方式
連続稼働時間(h)
回転直径 (mm)
路面勾配 (°)
| 本体サイズ (L*W*H) | 駆動方式 |
| 1145L*815W*260H mm | 両輪速度差 |
| 本体重量 | 走行速度 |
| 200kg | 2.0m/s |
| 荷物固定車両回転 | 場所 |
| 支持 | 室内 |
| 走行方法 | ドッキング精度 |
| 前後双方向、原地回転、左右回転 | ±10mm |
リフト上昇高さ (mm)
リフト上昇負荷 (kg)
ナビゲーション方式
連続稼働時間(h)
回転直径 (mm)
路面勾配 (°)

| 本体サイズ (L*W*H) | 駆動方式 |
| 1500L*1200W*360H mm | 両輪速度差 |
| 本体重量 | 走行速度 |
| 500kg | 0~1.5m/s |
| 荷物固定車両回転 | 場所 |
| 支持 | 室内 |
| 走行方法 | ドッキング精度 |
| 前後双方向、原地回転、左右回転 | ±10mm |
リフト上昇高さ (mm)
リフト上昇負荷 (kg)
ナビゲーション方式
連続稼働時間(h)
回転直径 (mm)
路面勾配 (°)

| 本体サイズ (L*W*H) | フォークアーム幅(内側/外側) |
| 1386L×1036W×245H mm | 246mm/642mm |
| 本体重量 | フォーク伸長距離 |
| 400kg | 1220mm |
| フォークアーム地上高 | 走行速度 |
| 90mm | 0~1.5 m/s |
| ナビゲーション精度 | 3Dビジョンによる障害物回避 |
| ±20mm | サポート |
障害物クリアランス高さ (mm)
リフト上昇負荷 (kg)
ナビゲーション方式
連続稼働時間(h)
回転直径 (mm)
路面勾配 (°)

| 本体サイズ (L*W*H) | 駆動メカニズム |
| L950*W650*H400mm | 全方向ドライブ |
| 本体重量 | 走行速度 |
| ≤150kg以下 | 0~1.5m/s |
| QRコードナビゲーション | 場所 |
| オプション | 室内 |
| ドライビング・ディレクション | ドッキング精度 |
| 前後直進、左右横行、旋回(その場回転)、左右旋回 | ±5mm(QRコードナビゲーション) |