Líder en diseño integrado de soluciones logísticas estables, modulares e inteligentes.
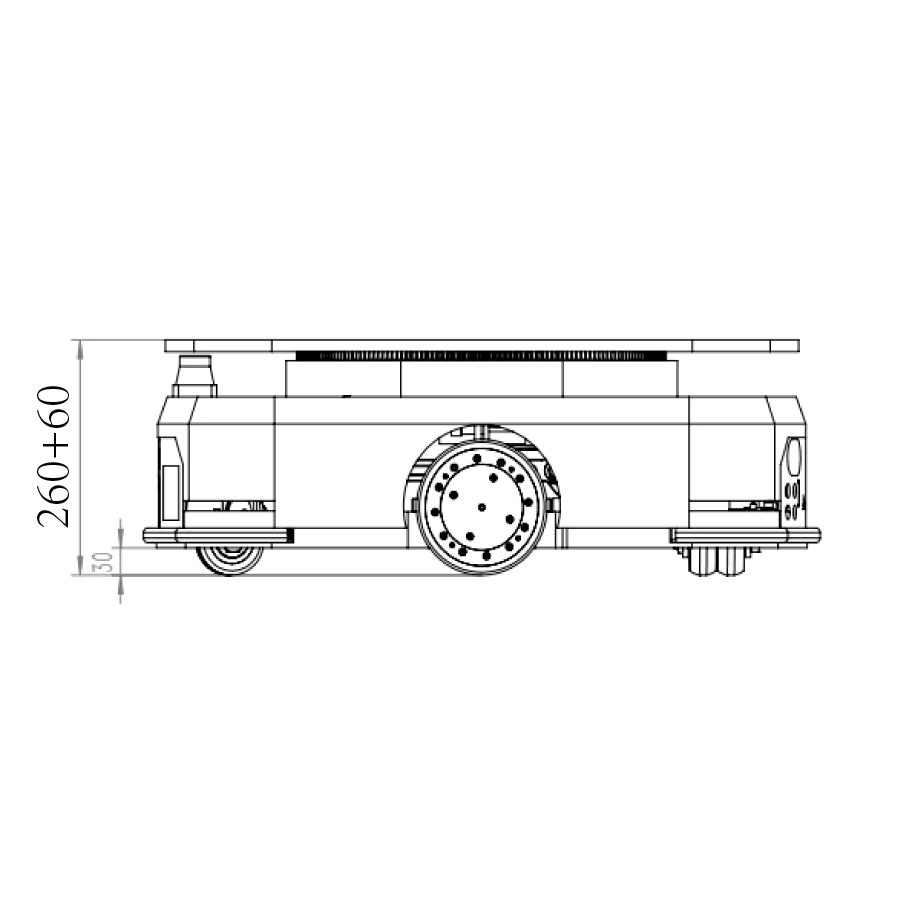
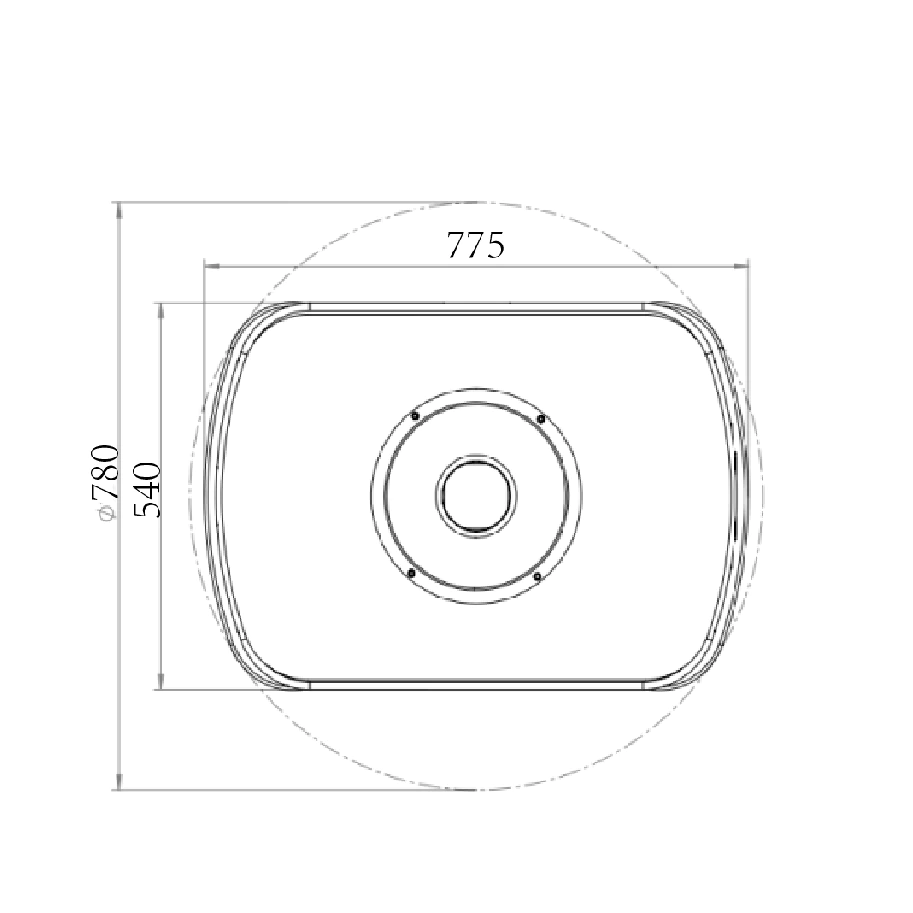
Nuestros robots de manipulación de materiales cuentan con un chasis integrado de fundición a presión y diseños modulares para mejorar la estabilidad. Con navegación SLAM por láser, se despliegan sin esfuerzo y sin marcadores. Los módulos de chasis personalizables permiten una integración perfecta con los sistemas in situ. Los controladores centrales admiten la carga autónoma y el funcionamiento ininterrumpido, ideal para fábricas y almacenes, con una capacidad de hasta 400 kg.