

민첩·정밀, 높은 호환성, 컴팩트하고 효율적
주요 기능
지능형 장애물 회피
LX-MRDVS® 기술을 통해 3D 비전과 AI 기반의 360° 전방위 장애물 감지가 가능하며, 보다 안전하고 지능적인 주행을 구현합니다.
자체 개발 핵심 제어 시스템
Lanxin의 자체 개발 컨트롤러를 적용하여 다양한 환경에서도 안정적이고 신뢰성 높은 성능을 제공합니다.
True SLAM 기반 자연 주행
별도의 환경 구축 없이 즉시 사용 가능하며, 고도화된 시맨틱 인식을 통해 정적·동적 장애물을 인식하고 정지와 회피 동작을 자동으로 전환합니다.
우수한 시스템 호환성
롤러, 랙, 안전 컨테이너 등 다양한 설비와 연동을 지원하며, 풍부한 인터페이스를 통해 다양한 현장에 유연하게 적용할 수 있습니다.
제품
리프팅 높이(mm)
정격 하중(kg)
탐색 모드
배터리 수명(시간)
회전 직경(mm)
도로 경사도(°)
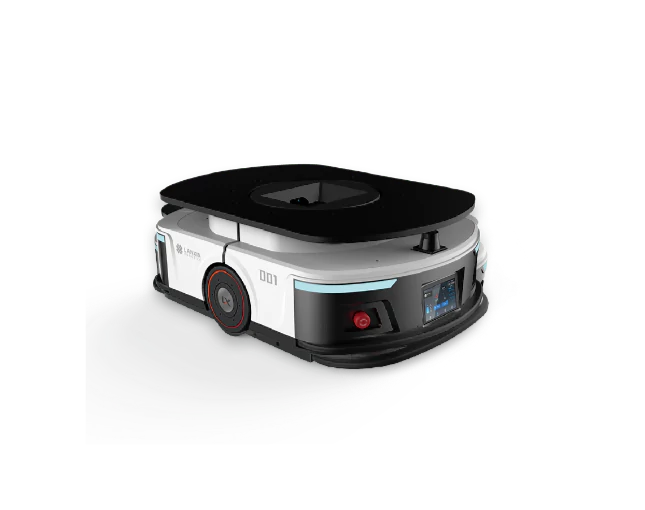
| 치수(L*W*H) | 드라이브 모드 |
| 775L*540W*260Hmm | 듀얼 휠 디퍼렌셜 |
| 순 중량 | 작동 이동 속도 |
| 90kg | 0~2.0m/s |
| 이동 없이 로드 전송 | 애플리케이션 시나리오 |
| 지원 | 실내 |
| 모빌리티 모드 | 위치 정확도 |
| 전진/후진 이동, 제자리 회전, 좌/우 회전 | ±10mm |
리프팅 높이(mm)
정격 하중(kg)
탐색 모드
배터리 수명(시간)
회전 직경(mm)
도로 경사도(°)
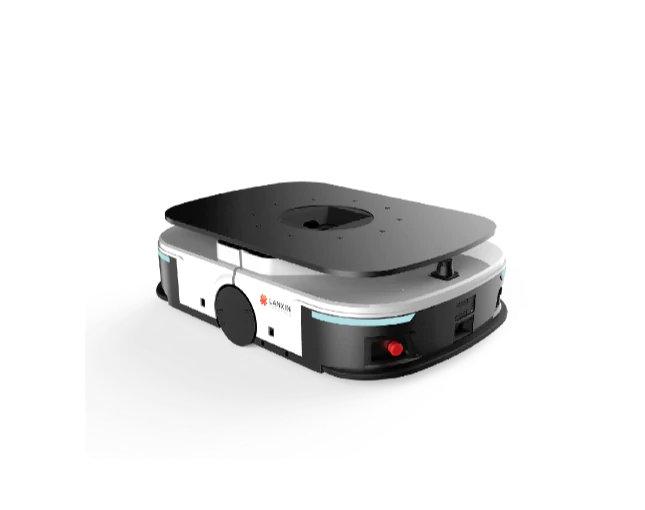
| 치수(L*W*H) | 드라이브 모드 |
| 700L*600W*351H mm | 듀얼 휠 디퍼렌셜 |
| 순 중량 | 작동 이동 속도 |
| 110kg | 1~1.5m/s |
| 이동 없이 로드 전송 | 애플리케이션 시나리오 |
| 지원 | 실내 |
| 모빌리티 모드 | 위치 정확도 |
| 전진/후진 이동, 제자리 회전, 좌/우 회전 | ±10mm |
리프팅 높이(mm)
정격 하중(kg)
탐색 모드
배터리 수명(시간)
회전 직경(mm)
도로 경사도(°)

| 치수(L*W*H) | 드라이브 모드 |
| 1145L*815W*260H mm | 듀얼 휠 디퍼렌셜 |
| 순 중량 | 작동 이동 속도 |
| 190kg | 2.0m/s |
| 이동 없이 로드 전송 | 애플리케이션 시나리오 |
| 지원 | 실내 |
| 모빌리티 모드 | 위치 정확도 |
| 전진/후진 이동, 제자리 회전, 좌/우 회전 | ±10mm |
리프팅 높이(mm)
정격 하중(kg)
탐색 모드
배터리 수명(시간)
회전 직경(mm)
도로 경사도(°)
| 치수(L*W*H) | 드라이브 모드 |
| 1145L*815W*260H mm | 듀얼 휠 디퍼렌셜 |
| 순 중량 | 작동 이동 속도 |
| 200kg | 2.0m/s |
| 이동 없이 로드 전송 | 애플리케이션 시나리오 |
| 지원 | 실내 |
| 모빌리티 모드 | 위치 정확도 |
| 전진/후진 이동, 제자리 회전, 좌/우 회전 | ±10mm |
리프팅 높이(mm)
정격 하중(kg)
탐색 모드
배터리 수명(시간)
회전 직경(mm)
도로 경사도(°)

| 치수(L*W*H) | 드라이브 모드 |
| 1500L*1200W*360H mm | 듀얼 휠 디퍼렌셜 |
| 순 중량 | 작동 이동 속도 |
| 500kg | 0~1.5m/s |
| 이동 없이 로드 전송 | 애플리케이션 시나리오 |
| 지원 | 실내 |
| 모빌리티 모드 | 위치 정확도 |
| 전진/후진 이동, 제자리 회전, 좌/우 회전 | ±10mm |
리프팅 높이(mm)
정격 하중(kg)
탐색 모드
배터리 수명(시간)
회전 직경(mm)
도로 경사도(°)

| 치수(L*W*H) | 포크 암 너비(내부/외부) |
| 1386L×1036W×245H mm | 246mm/642mm |
| 순 중량 | 포크 연장 거리 |
| 400kg | 1220mm |
| 포크 암 그라운드 클리어런스 | 작동 이동 속도 |
| 90mm | 0~1.5m/s |
| 내비게이션 정확도 | 3D 비전 장애물 회피 |
| ±20mm | 지원 |
장애물 클리어런스 높이(mm)
정격 하중(kg)
탐색 모드
배터리 수명(시간)
회전 직경(mm)
도로 경사도(°)

| 치수(L*W*H) | 드라이브 메커니즘 |
| L950*W650*H400mm | 전방향 드라이브 |
| 순 중량 | 작동 이동 속도 |
| ≤150kg | 0~1.5m/s |
| QR코드 탐색 | 애플리케이션 시나리오 |
| 선택 사항 | 실내 |
| 운전 방향 | 위치 정확도 |
| 전진/후진 직진, 좌/우 측면 이동, 제자리 회전, 좌/우 회전 | ±5mm(QR코드 내비게이션) |
적용 사례
적용 산업
전기·전자
True SLAM 기술 기반 자율 주행으로 별도의 인프라 구축이 필요 없습니다. 자체 개발한 시맨틱 AI가 정적·동적 장애물을 실시간으로 분류하고, 상황 인지 기반 회피 전략을 수행합니다.
